 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImproving Data Efficiency of Self-supervised Learning for Robotic Grasping
Paper and Code
Mar 01, 2019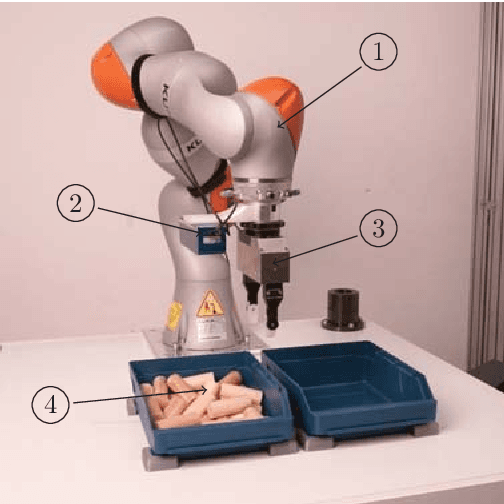
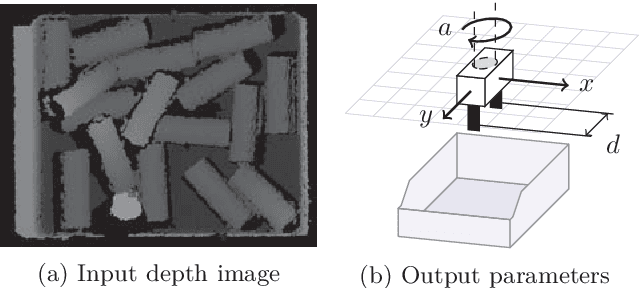
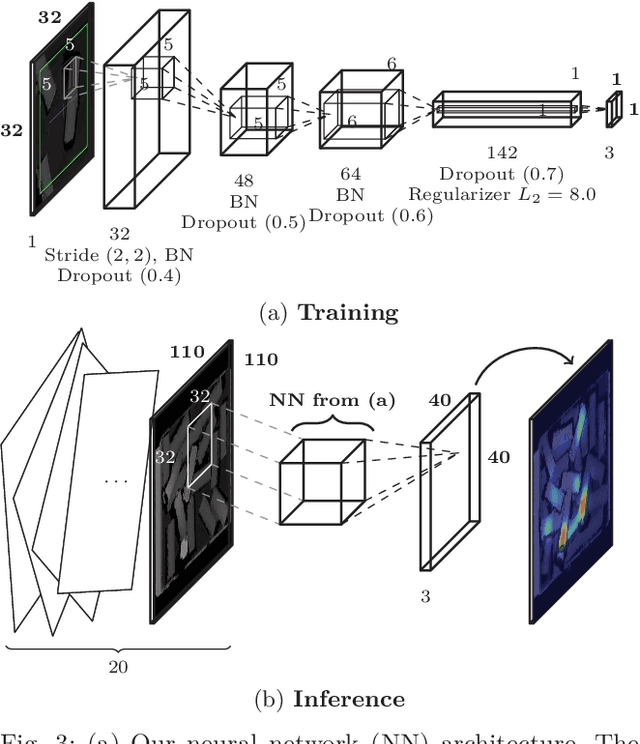
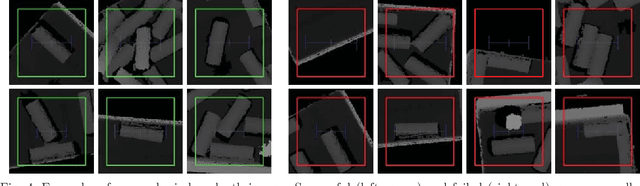
Given the task of learning robotic grasping solely based on a depth camera input and gripper force feedback, we derive a learning algorithm from an applied point of view to significantly reduce the amount of required training data. Major improvements in time and data efficiency are achieved by: Firstly, we exploit the geometric consistency between the undistorted depth images and the task space. Using a relative small, fully-convolutional neural network, we predict grasp and gripper parameters with great advantages in training as well as inference performance. Secondly, motivated by the small random grasp success rate of around 3%, the grasp space was explored in a systematic manner. The final system was learned with 23000 grasp attempts in around 60h, improving current solutions by an order of magnitude. For typical bin picking scenarios, we measured a grasp success rate of 96.6%. Further experiments showed that the system is able to generalize and transfer knowledge to novel objects and environments.