 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImplicit Object Mapping With Noisy Data
Paper and Code
Apr 22, 2022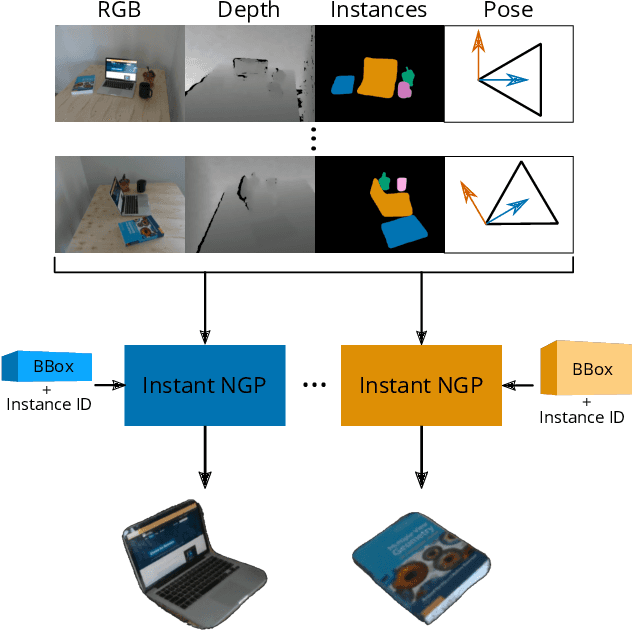
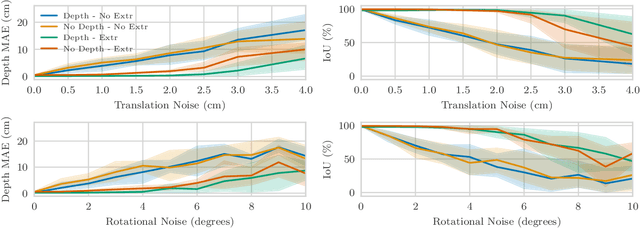
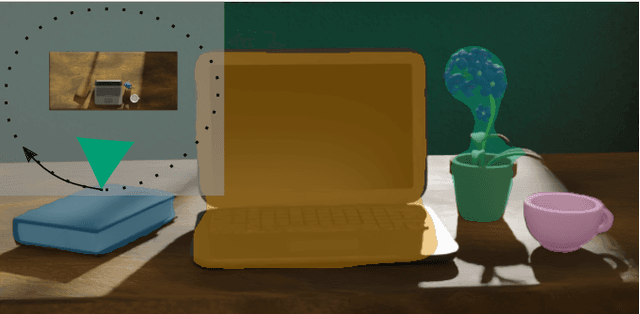

Modelling individual objects as Neural Radiance Fields (NeRFs) within a robotic context can benefit many downstream tasks such as scene understanding and object manipulation. However, real-world training data collected by a robot deviate from the ideal in several key aspects. (i) The trajectories are constrained and full visual coverage is not guaranteed - especially when obstructions are present. (ii) The poses associated with the images are noisy. (iii) The objects are not easily isolated from the background. This paper addresses the above three points and uses the outputs of an object-based SLAM system to bound objects in the scene with coarse primitives and - in concert with instance masks - identify obstructions in the training images. Objects are therefore automatically bounded, and non-relevant geometry is excluded from the NeRF representation. The method's performance is benchmarked under ideal conditions and tested against errors in the poses and instance masks. Our results show that object-based NeRFs are robust to pose variations but sensitive to the quality of the instance masks.