 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImplementing Virtual Reality for Teleoperation of a Humanoid Robot
Paper and Code
Apr 23, 2021

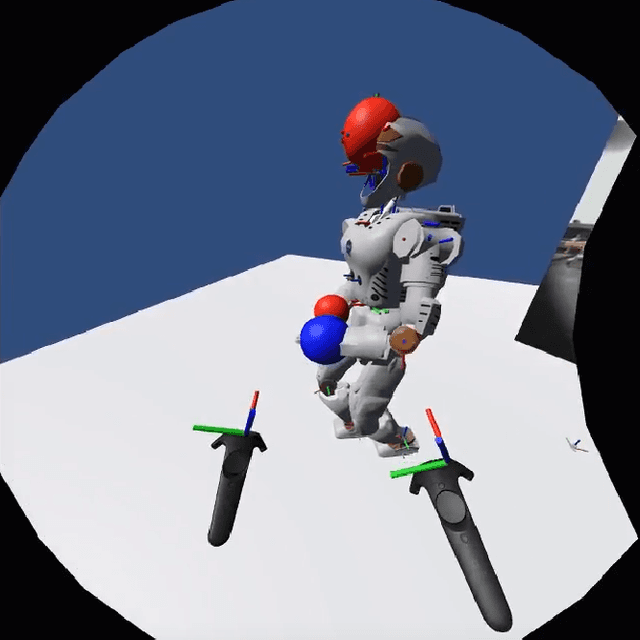
Our research explores the potential of a humanoid robot for work in unpredictable environments, but controlling a humanoid robot remains a very difficult problem. In our previous work, we designed a prototype virtual reality (VR) interface to allow an operator to command a humanoid robot. However, while usable, the initial interface was not sufficient for commanding the robot to perform the tasks; for example, in some cases, there was a lack of precision available for robot control. The interface was overly cumbersome in some areas as well. In this paper, we discuss numerous additions, inspired by traditional interfaces and virtual reality video games, to our prior implementation, providing additional ways to visualize and command a humanoid robot to perform difficult tasks within a virtual world.