 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImitation-Projected Policy Gradient for Programmatic Reinforcement Learning
Paper and Code
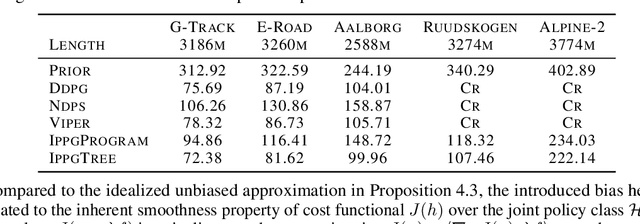
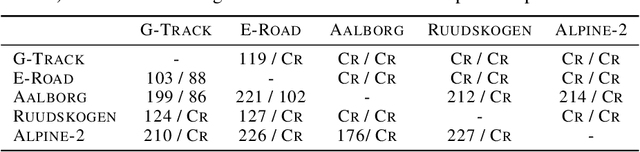
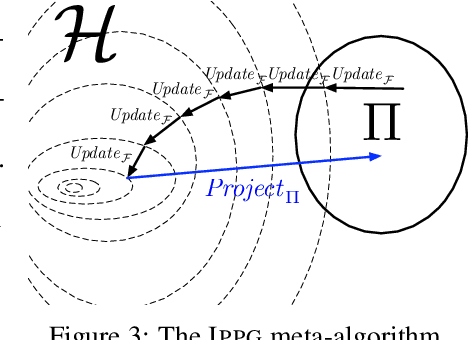
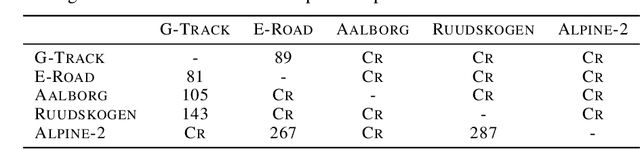
We present Imitation-Projected Policy Gradient (IPPG), an algorithmic framework for learning policies that are parsimoniously represented in a structured programming language. Such programmatic policies can be more interpretable, generalizable, and amenable to formal verification than neural policies; however, designing rigorous learning approaches for programmatic policies remains a challenge. IPPG, our response to this challenge, is based on three insights. First, we view our learning task as optimization in policy space, modulo the constraint that the desired policy has a programmatic representation, and solve this optimization problem using a "lift-and-project" perspective that takes a gradient step into the unconstrained policy space and then projects back onto the constrained space. Second, we view the unconstrained policy space as mixing neural and programmatic representations, which enables employing state-of-the-art deep policy gradient approaches. Third, we cast the projection step as program synthesis via imitation learning, and exploit contemporary combinatorial methods for this task. We present theoretical convergence results for IPPG, as well as an empirical evaluation in three continuous control domains. The experiments show that IPPG can significantly outperform state-of-the-art approaches for learning programmatic policies.