 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImitation Learning for Robust and Safe Real-time Motion Planning: A Contraction Theory Approach
Paper and Code
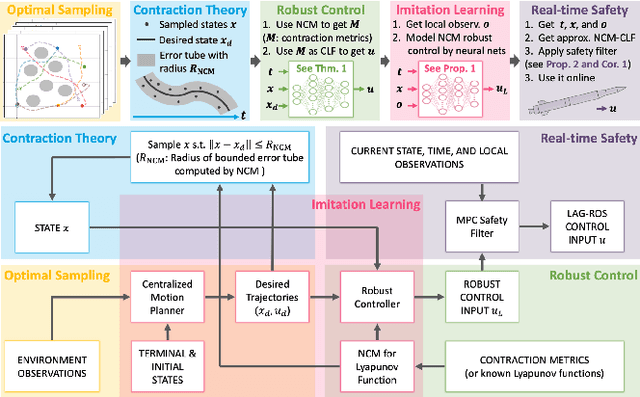
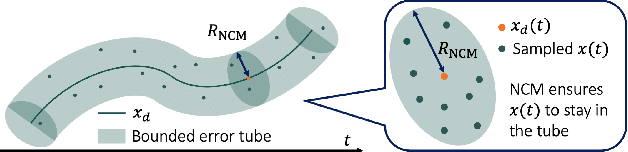

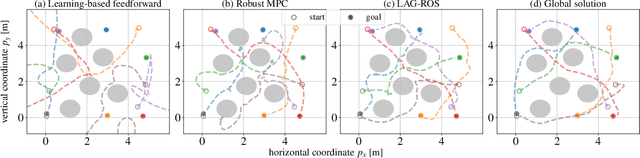
This paper presents Learning-based Autonomous Guidance with Robustness, Optimality, and Safety guarantees (LAG-ROS), a real-time robust motion planning algorithm for safety-critical nonlinear systems perturbed by bounded disturbances. The LAG-ROS method consists of three phases: 1) Control Lyapunov Function (CLF) construction via contraction theory; 2) imitation learning of the CLF-based robust feedback motion planner; and 3) its real-time and decentralized implementation with a learning-based model predictive safety filter. For the CLF, we exploit a neural-network-based method of Neural Contraction Metrics (NCMs), which provides a differential Lyapunov function to minimize an upper bound of the steady-state Euclidean distance between perturbed and unperturbed system trajectories. The NCM ensures the perturbed state to stay in bounded error tubes around given desired trajectories, where we sample training data for imitation learning of the NCM-CLF-based robust centralized motion planner. Using local observations in training also enables its decentralized implementation. Simulation results for perturbed nonlinear systems show that the LAG-ROS achieves higher control performance and task success rate with faster execution speed for real-time computation, when compared with the existing real-time robust MPC and learning-based feedforward motion planners.