 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImitation Learning for High Precision Peg-in-Hole Tasks
Paper and Code
Dec 26, 2020
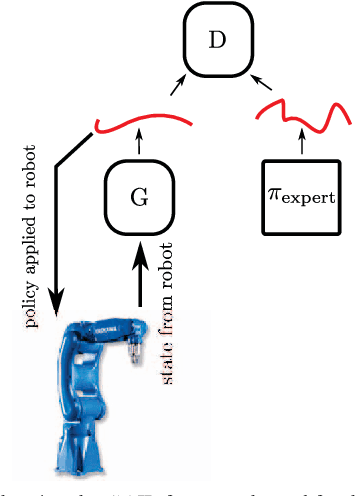
Industrial robot manipulators are not able to match the precision and speed with which humans are able to execute contact rich tasks even to this day. Therefore, as a means overcome this gap, we demonstrate generative methods for imitating a peg-in-hole insertion task in a 6-DOF robot manipulator. In particular, generative adversarial imitation learning (GAIL) is used to successfully achieve this task with a 10 um, and a 6 um peg-hole clearance on the Yaskawa GP8 industrial robot. Experimental results show that the policy successfully learns within 20 episodes from a handful of human expert demonstrations on the robot (i.e., < 10 tele-operated robot demonstrations). The insertion time improves from > 20 seconds (which also includes failed insertions) to < 15 seconds, thereby validating the effectiveness of this approach.