 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIC-GVINS: A Robust, Real-time, INS-Centric GNSS-Visual-Inertial Navigation System for Wheeled Robot
Paper and Code
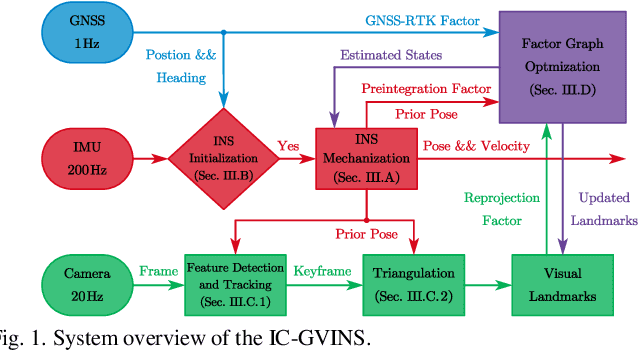
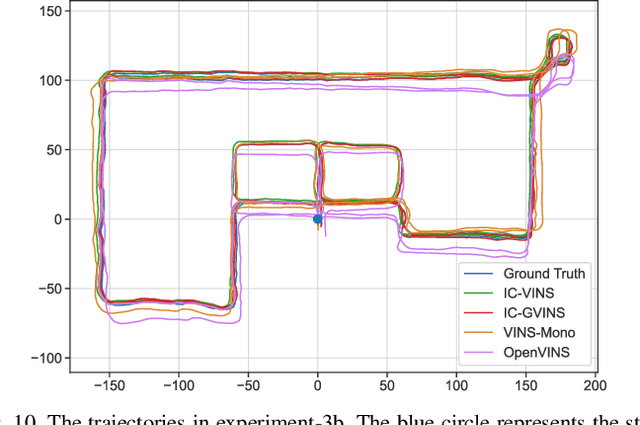
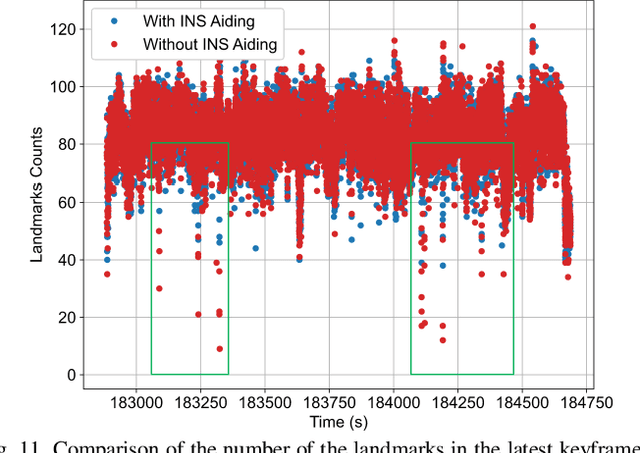
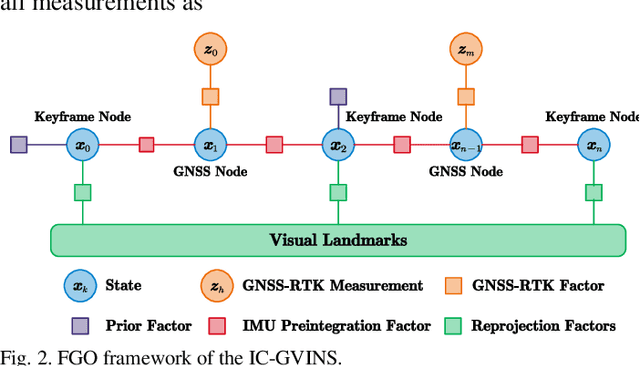
In this letter, we present a robust, real-time, inertial navigation system (INS)-Centric GNSS-Visual-Inertial navigation system (IC-GVINS) for wheeled robot, in which the precise INS is fully utilized in both the state estimation and visual process. To improve the system robustness, the INS information is employed during the whole keyframe-based visual process, with strict outlier-culling strategy. GNSS is adopted to perform an accurate and convenient initialization of the IC-GVINS, and is further employed to achieve absolute positioning in large-scale environments. The IMU, visual, and GNSS measurements are tightly fused within the framework of factor graph optimization. Dedicated experiments were conducted to evaluate the robustness and accuracy of the IC-GVINS on a wheeled robot. The IC-GVINS demonstrates superior robustness in various visual-degenerated scenes with moving objects. Compared to the state-of-the-art visual-inertial navigation systems, the proposed method yields improved robustness and accuracy in various environments. We open source our codes combined with the dataset on GitHub