 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIA Planner: Motion Planning Using Instantaneous Analysis for Autonomous Vehicle in the Dense Dynamic Scenarios on Highways
Paper and Code
Mar 19, 2021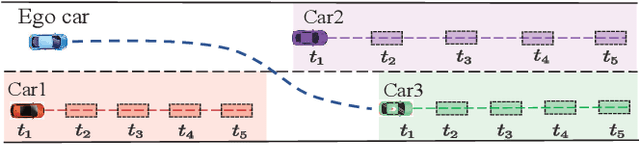
In dense and dynamic scenarios, planning a safe and comfortable trajectory is full of challenges when traffic participants are driving at high speed. The classic graph search and sampling methods first perform path planning and then configure the corresponding speed, which lacks a strategy to deal with the high-speed obstacles. Decoupling optimization methods perform motion planning in the S-L and S-T domains respectively. These methods require a large free configuration space to plan the lane change trajectory. In dense dynamic scenes, it is easy to cause the failure of trajectory planning and be cut in by others, causing slow driving speed and bring safety hazards. We analyze the collision relationship in the spatio-temporal domain, and propose an instantaneous analysis model which only analyzes the collision relationship at the same time. In the model, the collision-free constraints in 3D spatio-temporal domain is projected to the 2D space domain to remove redundant constraints and reduce computational complexity. Experimental results show that our method can plan a safe and comfortable lane-changing trajectory in dense dynamic scenarios. At the same time, it improves traffic efficiency and increases ride comfort.