 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeI Open at the Close: A Deep Reinforcement Learning Evaluation of Open Streets Initiatives
Paper and Code
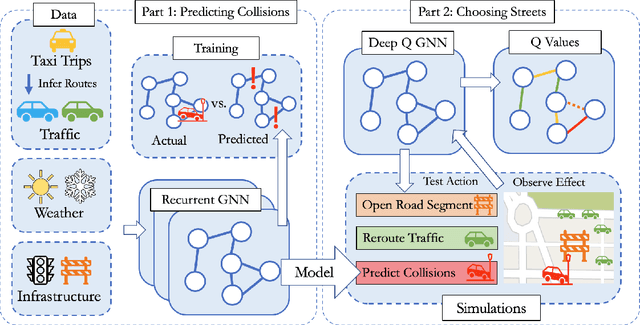
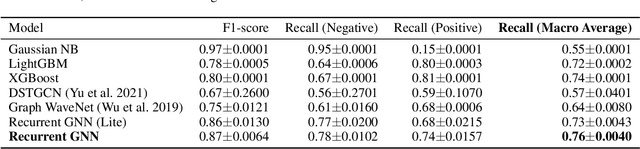
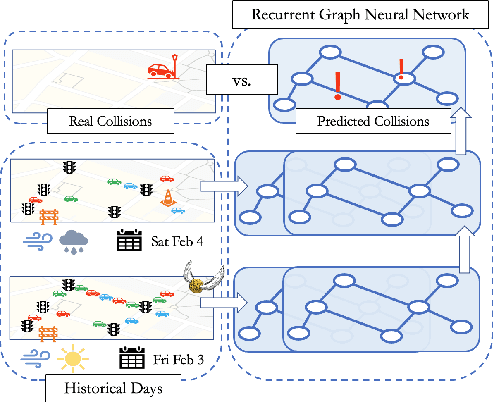
The open streets initiative "opens" streets to pedestrians and bicyclists by closing them to cars and trucks. The initiative, adopted by many cities across North America, increases community space in urban environments. But could open streets also make cities safer and less congested? We study this question by framing the choice of which streets to open as a reinforcement learning problem. In order to simulate the impact of opening streets, we first compare models for predicting vehicle collisions given network and temporal data. We find that a recurrent graph neural network, leveraging the graph structure and the short-term temporal dependence of the data, gives the best predictive performance. Then, with the ability to simulate collisions and traffic, we frame a reinforcement learning problem to find which streets to open. We compare the streets in the NYC Open Streets program to those proposed by a Q-learning algorithm. We find that the streets proposed by the Q-learning algorithm have reliably better outcomes, while streets in the program have similar outcomes to randomly selected streets. We present our work as a step toward principally choosing which streets to open for safer and less congested cities. All our code and data are available on Github.