 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeI Know You Can't See Me: Dynamic Occlusion-Aware Safety Validation of Strategic Planners for Autonomous Vehicles Using Hypergames
Paper and Code
Sep 20, 2021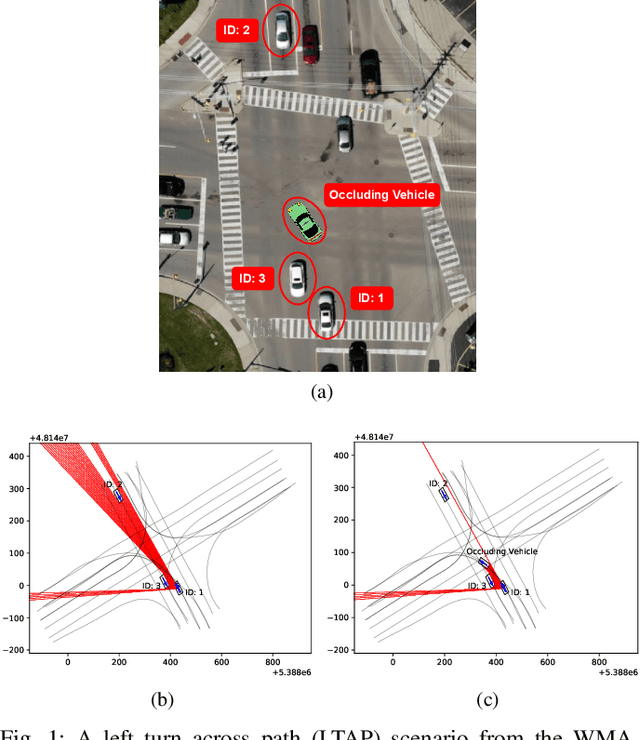
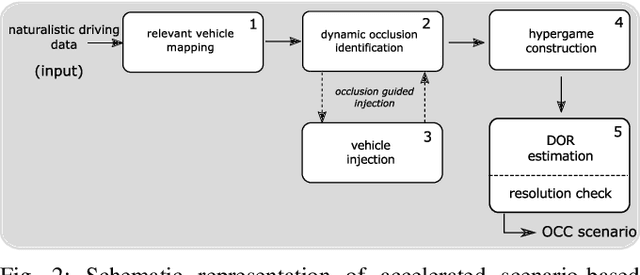
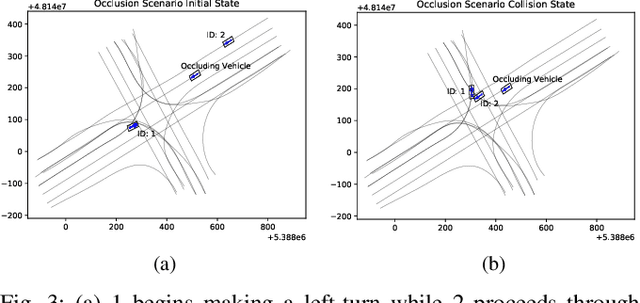
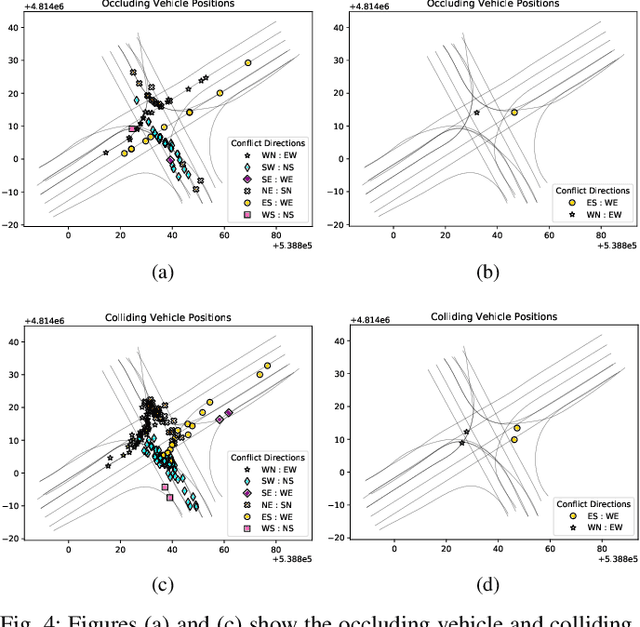
A particular challenge for both autonomous and human driving is dealing with risk associated with dynamic occlusion, i.e., occlusion caused by other vehicles in traffic. Based on the theory of hypergames, we develop a novel multi-agent dynamic occlusion risk (DOR) measure for assessing situational risk in dynamic occlusion scenarios. Furthermore, we present a white-box, scenario-based, accelerated safety validation framework for assessing safety of strategic planners in AV. Based on evaluation over a large naturalistic database, our proposed validation method achieves a 4000% speedup compared to direct validation on naturalistic data, a more diverse coverage, and ability to generalize beyond the dataset and generate commonly observed dynamic occlusion crashes in traffic in an automated manner.