 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHybrid Event Shaping to Stabilize Periodic Hybrid Orbits
Paper and Code
Oct 05, 2021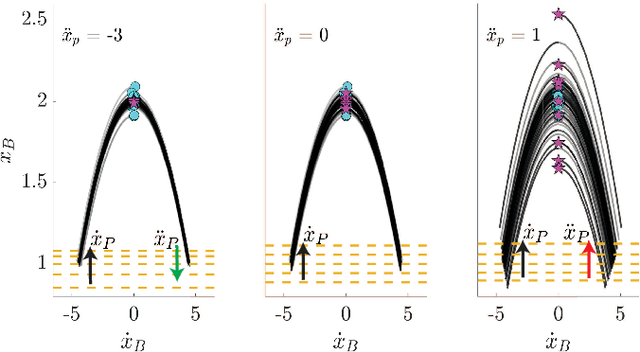
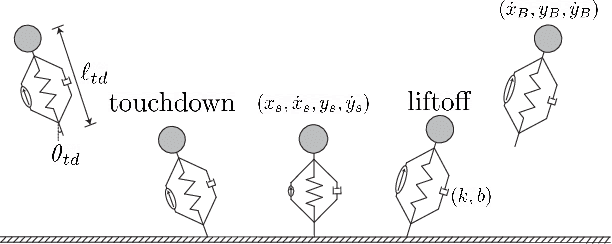
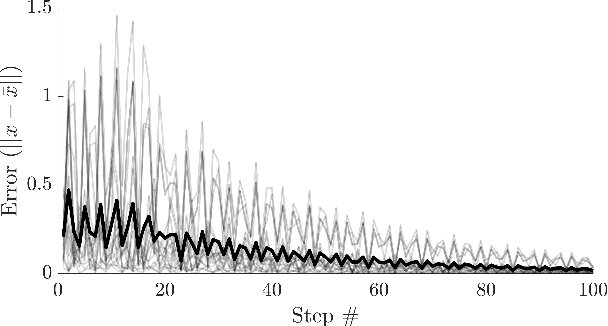
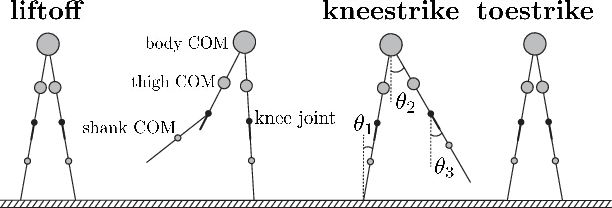
Many controllers for legged robotic systems leverage open- or closed-loop control at discrete hybrid events to enhance stability. These controllers appear in several well studied phenomena such as the Raibert stepping controller, paddle juggling and swing leg retraction. This work introduces hybrid event shaping (HES): a generalized method for analyzing and producing stable hybrid event controllers. HES utilizes the saltation matrix, which gives a closed-form equation for the effect that hybrid events have on stability. We also introduce shape parameters, which are higher order terms that can be tuned completely independently from the system dynamics to promote stability. Optimization methods are used to produce values of these parameters that optimize a stability measure. Hybrid event shaping captures previously developed control methods while also producing new optimally stable trajectories without the need for continuous-domain feedback.