 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHybrid Actuator Design for a Gait Augmentation Wearable
Paper and Code
Mar 07, 2020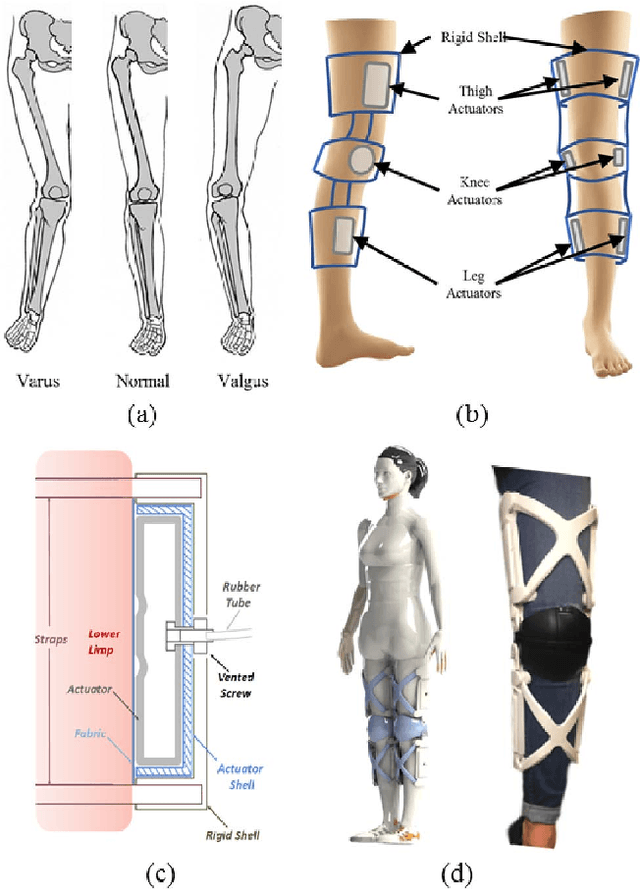
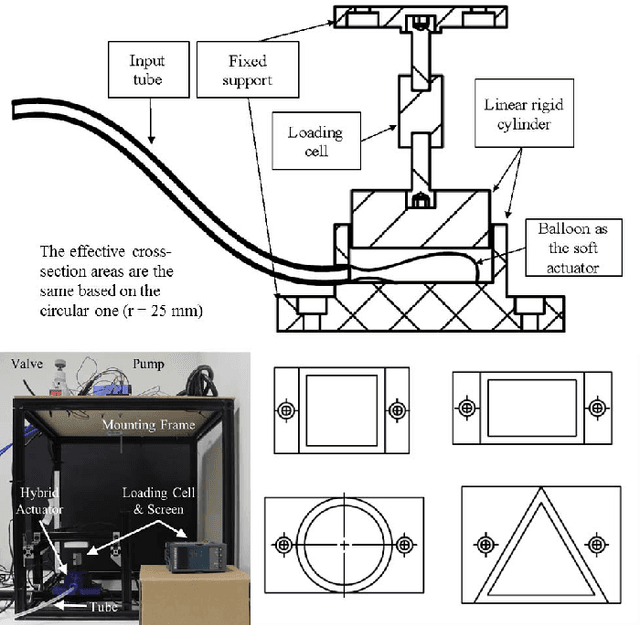


We describe a fluidic actuator design that replaces the sealed chamber of a hydraulic cylinder using a soft actuator to provide compliant linear compression with a large force ($\geq$100 N) at a low operation pressure ($\leq$50 kPa) for a lower-limb wearable. The external shells constrain the deformation of the soft actuator under fluidic pressurization. This enables us to use latex party balloons as a quick and cheap alternative for initial design investigation. We found that the forces exerted by the soft material deformation are well-captured by the rigid shells, removing the necessity of explicitly describing the mechanics of the soft material deformation and its interaction with the rigid structure. One can use the classical Force, Pressure and Area formula factored with an efficiency parameter to characterize the actuator performance. Furthermore, we proposed an engineering design of the hybrid actuator using a customized soft actuator placed inside a single shell cavity with an open end for the compression force. Our results show that the proposed design can generate a very high force within a short stroke distance. At a low input pressure of 50 kPa, the exerted block force is approaching only about 3\% less than the classical equation predicted. The actuator is fitted to a new gait augmentation design for correcting knee alignment, which is usually challenging for actuators made from the purely soft material.