 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHow to Extract the Geometry and Topology from Very Large 3D Segmentations
Paper and Code
Sep 30, 2010
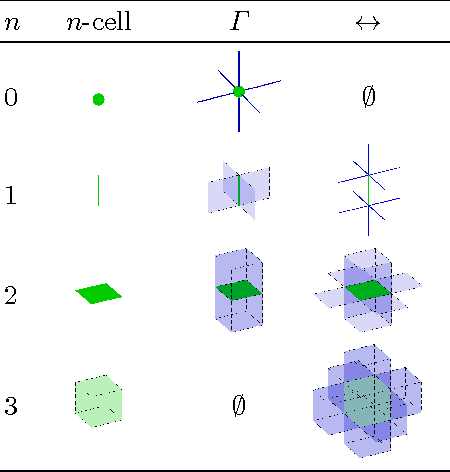
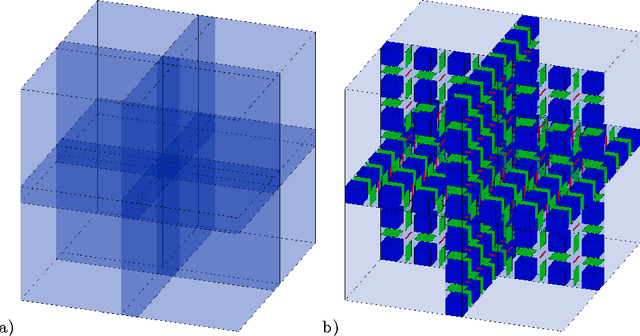
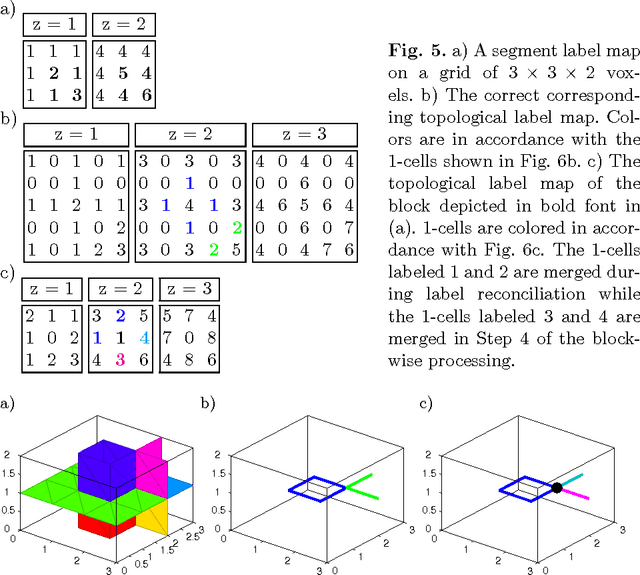
Segmentation is often an essential intermediate step in image analysis. A volume segmentation characterizes the underlying volume image in terms of geometric information--segments, faces between segments, curves in which several faces meet--as well as a topology on these objects. Existing algorithms encode this information in designated data structures, but require that these data structures fit entirely in Random Access Memory (RAM). Today, 3D images with several billion voxels are acquired, e.g. in structural neurobiology. Since these large volumes can no longer be processed with existing methods, we present a new algorithm which performs geometry and topology extraction with a runtime linear in the number of voxels and log-linear in the number of faces and curves. The parallelizable algorithm proceeds in a block-wise fashion and constructs a consistent representation of the entire volume image on the hard drive, making the structure of very large volume segmentations accessible to image analysis. The parallelized C++ source code, free command line tools and MATLAB mex files are avilable from http://hci.iwr.uni-heidelberg.de/software.php