 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHow much depth information can radar infer and contribute
Paper and Code
Feb 26, 2022
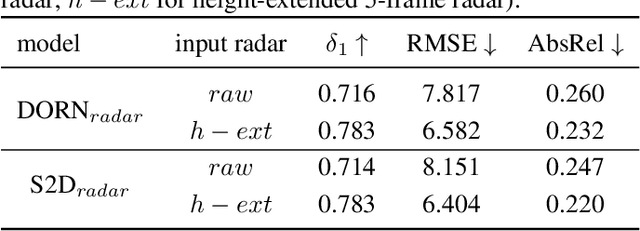
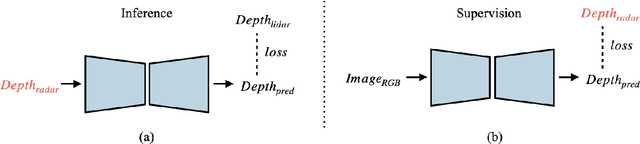
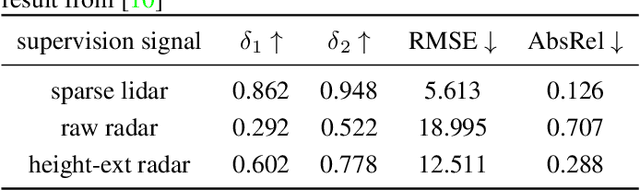
Since the release of radar data in large scale autonomous driving dataset, many works have been proposed fusing radar data as an additional guidance signal into monocular depth estimation models. Although positive performances are reported, it is still hard to tell how much depth information radar can infer and contribute in depth estimation models. In this paper, we conduct two experiments to investigate the intrinsic depth capability of radar data using state-of-the-art depth estimation models. Our experiments demonstrate that the estimated depth from only sparse radar input can detect the shape of surroundings to a certain extent. Furthermore, the monocular depth estimation model supervised by preprocessed radar only during training can achieve 70% performance in delta_1 score compared to the baseline model trained with sparse lidar.