 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHolo-Dex: Teaching Dexterity with Immersive Mixed Reality
Paper and Code
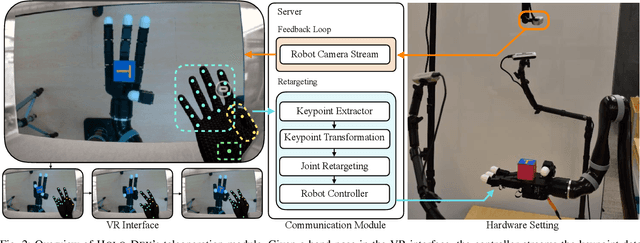
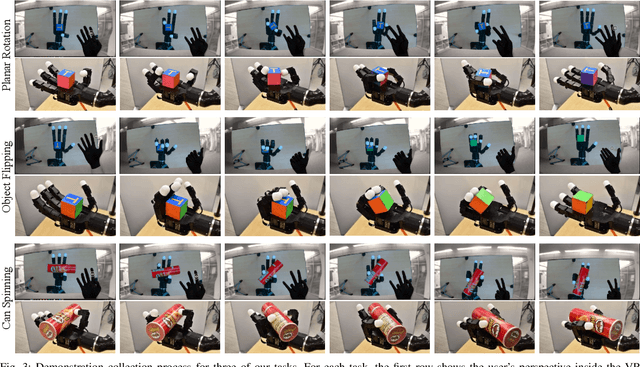
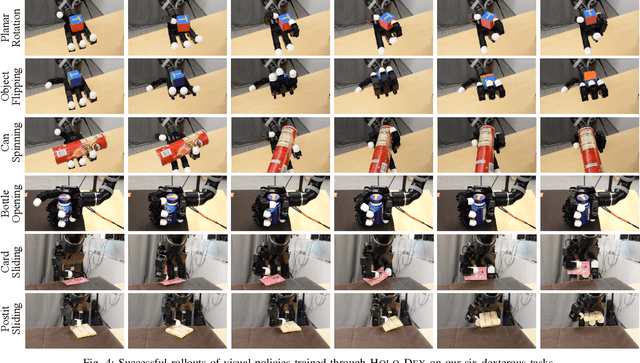
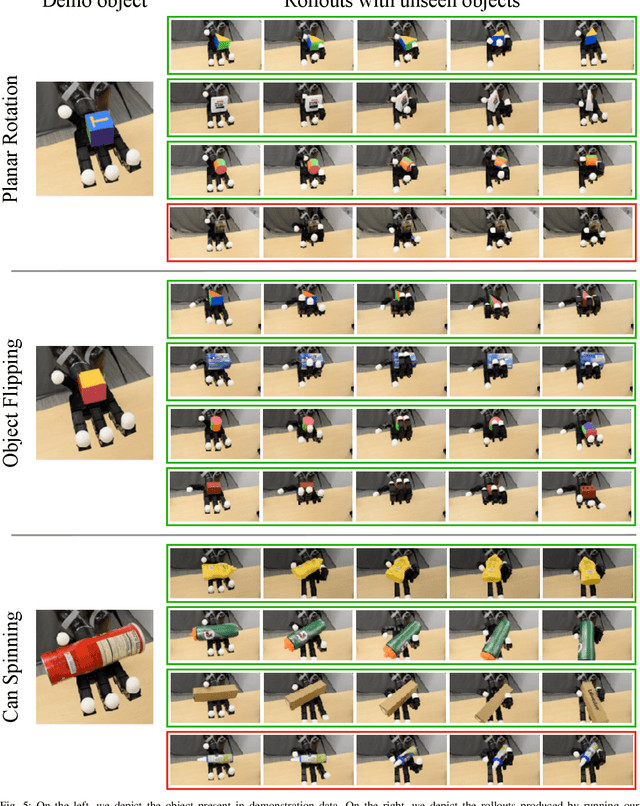
A fundamental challenge in teaching robots is to provide an effective interface for human teachers to demonstrate useful skills to a robot. This challenge is exacerbated in dexterous manipulation, where teaching high-dimensional, contact-rich behaviors often require esoteric teleoperation tools. In this work, we present Holo-Dex, a framework for dexterous manipulation that places a teacher in an immersive mixed reality through commodity VR headsets. The high-fidelity hand pose estimator onboard the headset is used to teleoperate the robot and collect demonstrations for a variety of general-purpose dexterous tasks. Given these demonstrations, we use powerful feature learning combined with non-parametric imitation to train dexterous skills. Our experiments on six common dexterous tasks, including in-hand rotation, spinning, and bottle opening, indicate that Holo-Dex can both collect high-quality demonstration data and train skills in a matter of hours. Finally, we find that our trained skills can exhibit generalization on objects not seen in training. Videos of Holo-Dex are available at https://holo-dex.github.io.