 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHMDO: Markerless Multi-view Hand Manipulation Capture with Deformable Objects
Paper and Code
Jan 18, 2023
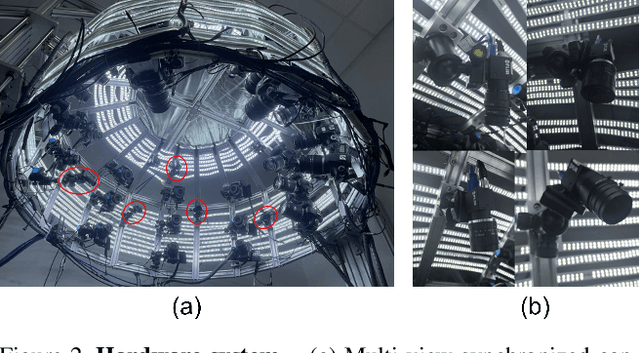
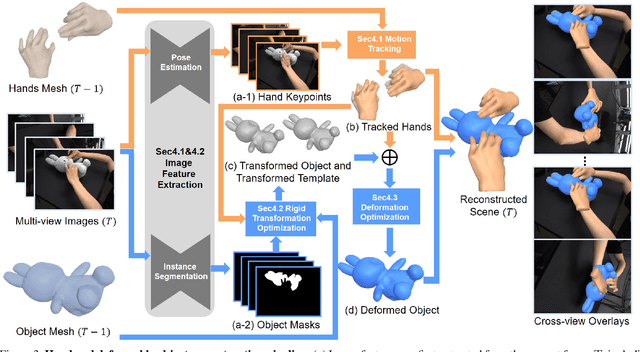
We construct the first markerless deformable interaction dataset recording interactive motions of the hands and deformable objects, called HMDO (Hand Manipulation with Deformable Objects). With our built multi-view capture system, it captures the deformable interactions with multiple perspectives, various object shapes, and diverse interactive forms. Our motivation is the current lack of hand and deformable object interaction datasets, as 3D hand and deformable object reconstruction is challenging. Mainly due to mutual occlusion, the interaction area is difficult to observe, the visual features between the hand and the object are entangled, and the reconstruction of the interaction area deformation is difficult. To tackle this challenge, we propose a method to annotate our captured data. Our key idea is to collaborate with estimated hand features to guide the object global pose estimation, and then optimize the deformation process of the object by analyzing the relationship between the hand and the object. Through comprehensive evaluation, the proposed method can reconstruct interactive motions of hands and deformable objects with high quality. HMDO currently consists of 21600 frames over 12 sequences. In the future, this dataset could boost the research of learning-based reconstruction of deformable interaction scenes.