 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHilbert Space Embeddings of Predictive State Representations
Paper and Code
Sep 26, 2013
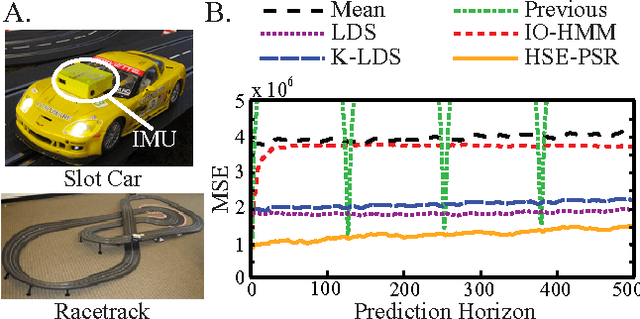
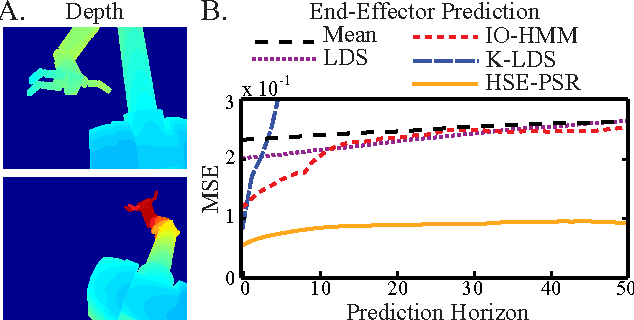
Predictive State Representations (PSRs) are an expressive class of models for controlled stochastic processes. PSRs represent state as a set of predictions of future observable events. Because PSRs are defined entirely in terms of observable data, statistically consistent estimates of PSR parameters can be learned efficiently by manipulating moments of observed training data. Most learning algorithms for PSRs have assumed that actions and observations are finite with low cardinality. In this paper, we generalize PSRs to infinite sets of observations and actions, using the recent concept of Hilbert space embeddings of distributions. The essence is to represent the state as a nonparametric conditional embedding operator in a Reproducing Kernel Hilbert Space (RKHS) and leverage recent work in kernel methods to estimate, predict, and update the representation. We show that these Hilbert space embeddings of PSRs are able to gracefully handle continuous actions and observations, and that our learned models outperform competing system identification algorithms on several prediction benchmarks.