 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHighway Driving Dataset for Semantic Video Segmentation
Paper and Code
Nov 02, 2020
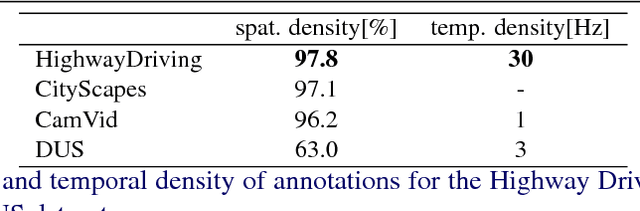
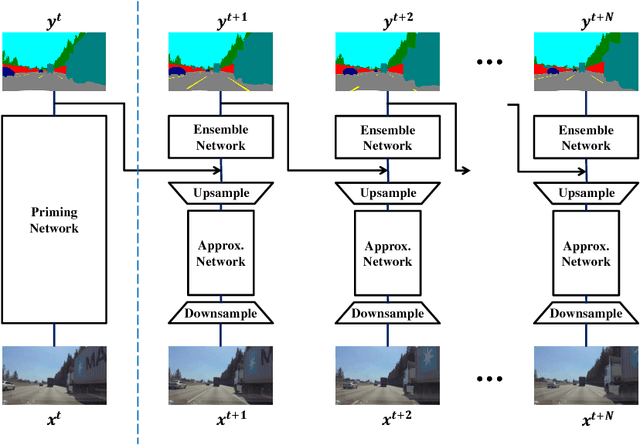
Scene understanding is an essential technique in semantic segmentation. Although there exist several datasets that can be used for semantic segmentation, they are mainly focused on semantic image segmentation with large deep neural networks. Therefore, these networks are not useful for real time applications, especially in autonomous driving systems. In order to solve this problem, we make two contributions to semantic segmentation task. The first contribution is that we introduce the semantic video dataset, the Highway Driving dataset, which is a densely annotated benchmark for a semantic video segmentation task. The Highway Driving dataset consists of 20 video sequences having a 30Hz frame rate, and every frame is densely annotated. Secondly, we propose a baseline algorithm that utilizes a temporal correlation. Together with our attempt to analyze the temporal correlation, we expect the Highway Driving dataset to encourage research on semantic video segmentation.