 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHierarchical Neuro-Symbolic Decision Transformer
Paper and Code
Mar 10, 2025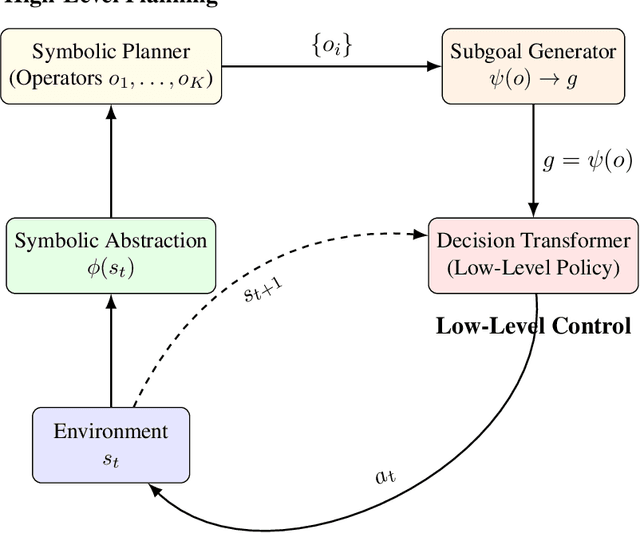
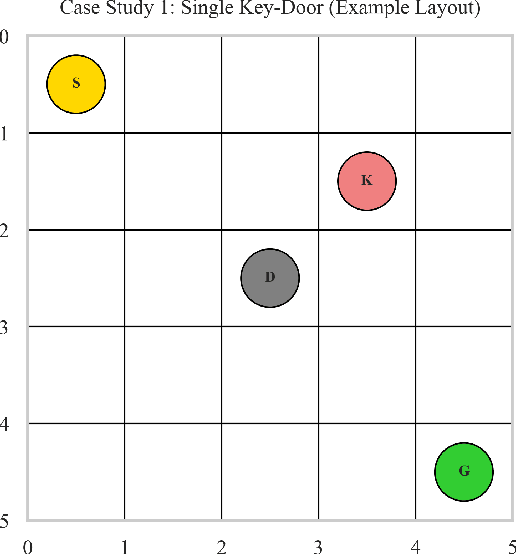
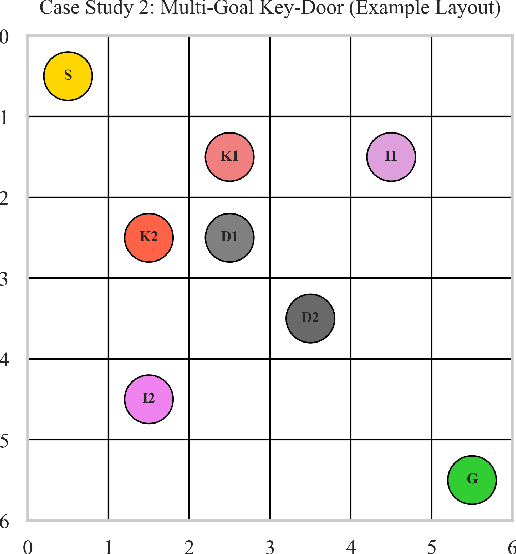
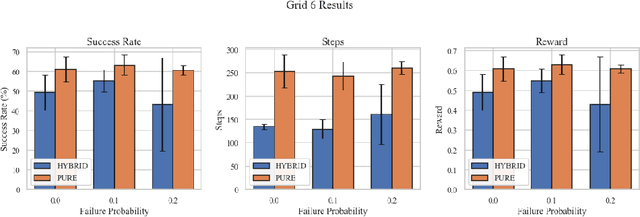
We present a hierarchical neuro-symbolic control framework that couples classical symbolic planning with transformer-based policies to address complex, long-horizon decision-making tasks. At the high level, a symbolic planner constructs an interpretable sequence of operators based on logical propositions, ensuring systematic adherence to global constraints and goals. At the low level, each symbolic operator is translated into a sub-goal token that conditions a decision transformer to generate a fine-grained sequence of actions in uncertain, high-dimensional environments. We provide theoretical analysis showing how approximation errors from both the symbolic planner and the neural execution layer accumulate. Empirical evaluations in grid-worlds with multiple keys, locked doors, and item-collection tasks show that our hierarchical approach outperforms purely end-to-end neural approach in success rates and policy efficiency.