 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHierarchical Decision Mamba
Paper and Code
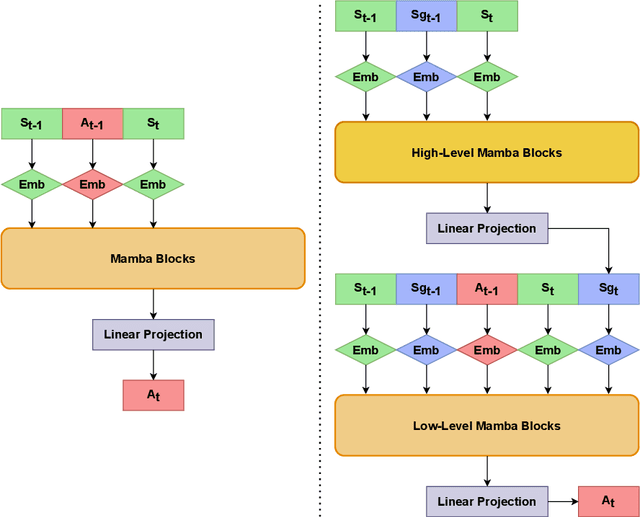



Recent advancements in imitation learning have been largely fueled by the integration of sequence models, which provide a structured flow of information to effectively mimic task behaviours. Currently, Decision Transformer (DT) and subsequently, the Hierarchical Decision Transformer (HDT), presented Transformer-based approaches to learn task policies. Recently, the Mamba architecture has shown to outperform Transformers across various task domains. In this work, we introduce two novel methods, Decision Mamba (DM) and Hierarchical Decision Mamba (HDM), aimed at enhancing the performance of the Transformer models. Through extensive experimentation across diverse environments such as OpenAI Gym and D4RL, leveraging varying demonstration data sets, we demonstrate the superiority of Mamba models over their Transformer counterparts in a majority of tasks. Results show that HDM outperforms other methods in most settings. The code can be found at https://github.com/meowatthemoon/HierarchicalDecisionMamba.