 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHierarchical Control for Bipedal Locomotion using Central Pattern Generators and Neural Networks
Paper and Code
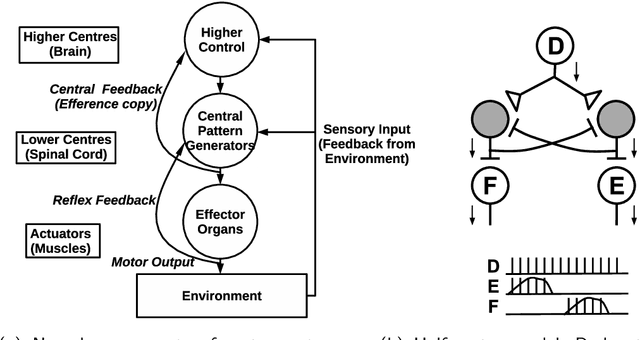
The complexity of bipedal locomotion may be attributed to the difficulty in synchronizing joint movements while at the same time achieving high-level objectives such as walking in a particular direction. Artificial central pattern generators (CPGs) can produce synchronized joint movements and have been used in the past for bipedal locomotion. However, most existing CPG-based approaches do not address the problem of high-level control explicitly. We propose a novel hierarchical control mechanism for bipedal locomotion where an optimized CPG network is used for joint control and a neural network acts as a high-level controller for modulating the CPG network. By separating motion generation from motion modulation, the high-level controller does not need to control individual joints directly but instead can develop to achieve a higher goal using a low-dimensional control signal. The feasibility of the hierarchical controller is demonstrated through simulation experiments using the Neuro-Inspired Companion (NICO) robot. Experimental results demonstrate the controller's ability to function even without the availability of an exact robot model.