 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHG2P: Hippocampus-inspired High-reward Graph and Model-Free Q-Gradient Penalty for Path Planning and Motion Control
Paper and Code
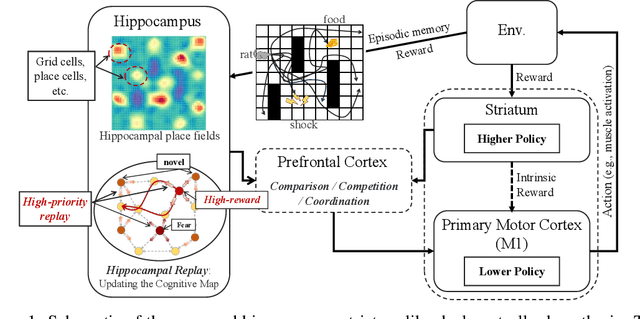
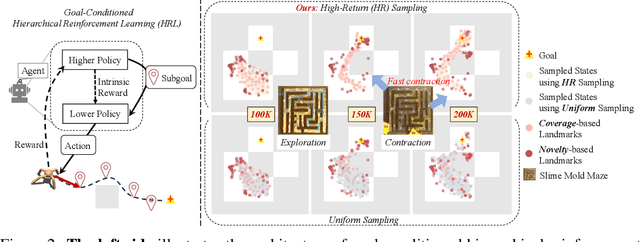
Goal-conditioned hierarchical reinforcement learning (HRL) decomposes complex reaching tasks into a sequence of simple subgoal-conditioned tasks, showing significant promise for addressing long-horizon planning in large-scale environments. This paper bridges the goal-conditioned HRL based on graph-based planning to brain mechanisms, proposing a hippocampus-striatum-like dual-controller hypothesis. Inspired by the brain mechanisms of organisms (i.e., the high-reward preferences observed in hippocampal replay) and instance-based theory, we propose a high-return sampling strategy for constructing memory graphs, improving sample efficiency. Additionally, we derive a model-free lower-level Q-function gradient penalty to resolve the model dependency issues present in prior work, improving the generalization of Lipschitz constraints in applications. Finally, we integrate these two extensions, High-reward Graph and model-free Gradient Penalty (HG2P), into the state-of-the-art framework ACLG, proposing a novel goal-conditioned HRL framework, HG2P+ACLG. Experimentally, the results demonstrate that our method outperforms state-of-the-art goal-conditioned HRL algorithms on a variety of long-horizon navigation tasks and robotic manipulation tasks.