 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHeterogeneous Interaction Modeling With Reduced Accumulated Error for Multi-Agent Trajectory Prediction
Paper and Code
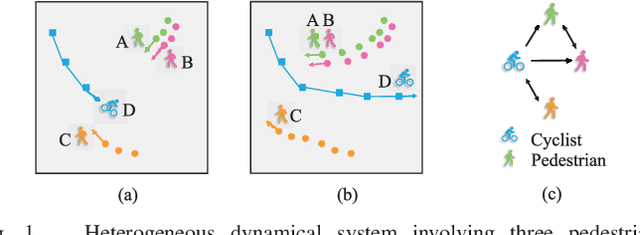
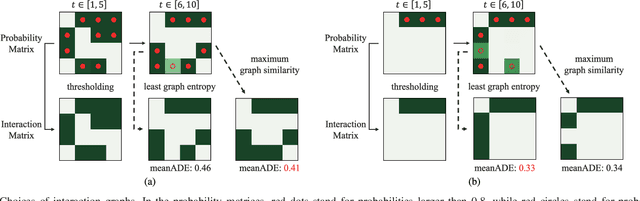
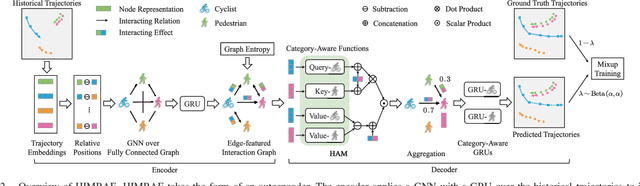
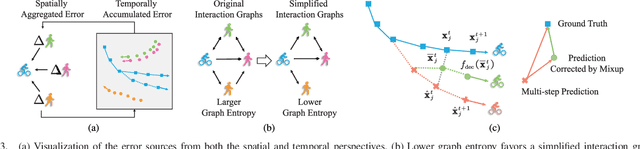
Dynamical complex systems composed of interactive heterogeneous agents are prevalent in the world, including urban traffic systems and social networks. Modeling the interactions among agents is the key to understanding and predicting the dynamics of the complex system, e.g., predicting the trajectories of traffic participants in the city. Compared with interaction modeling in homogeneous systems such as pedestrians in a crowded scene, heterogeneous interaction modeling is less explored. Worse still, the error accumulation problem becomes more severe since the interactions are more complex. To tackle the two problems, this paper proposes heterogeneous interaction modeling with reduced accumulated error for multi-agent trajectory prediction. Based on the historical trajectories, our method infers the dynamic interaction graphs among agents, featured by directed interacting relations and interacting effects. A heterogeneous attention mechanism is defined on the interaction graphs for aggregating the influence from heterogeneous neighbors to the target agent. To alleviate the error accumulation problem, this paper analyzes the error sources from the spatial and temporal perspectives, and proposes to introduce the graph entropy and the mixup training strategy for reducing the two types of errors respectively. Our method is examined on three real-world datasets containing heterogeneous agents, and the experimental results validate the superiority of our method.