 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHarnessing Uncertainty-aware Bounding Boxes for Unsupervised 3D Object Detection
Paper and Code
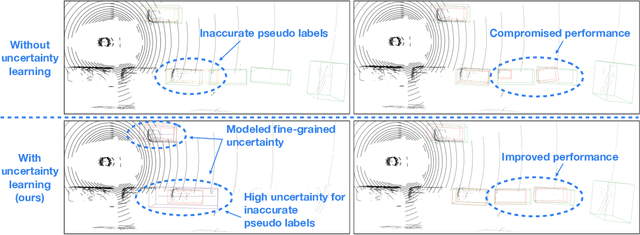
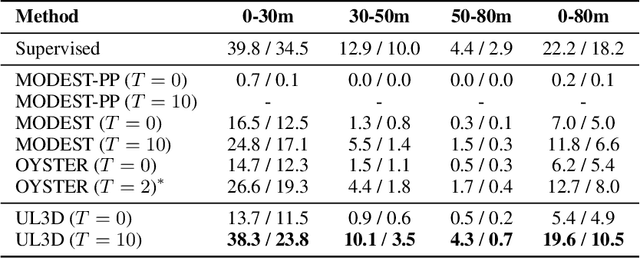
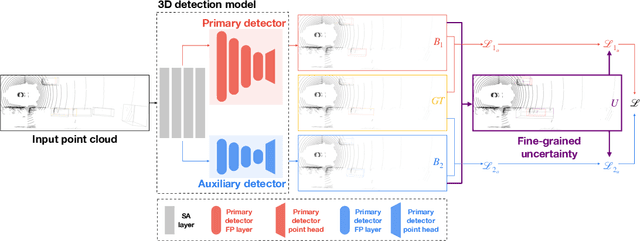
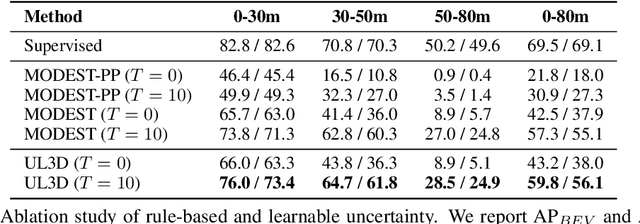
Unsupervised 3D object detection aims to identify objects of interest from unlabeled raw data, such as LiDAR points. Recent approaches usually adopt pseudo 3D bounding boxes (3D bboxes) from clustering algorithm to initialize the model training, and then iteratively updating both pseudo labels and the trained model. However, pseudo bboxes inevitably contain noises, and such inaccurate annotation accumulates to the final model, compromising the performance. Therefore, in an attempt to mitigate the negative impact of pseudo bboxes, we introduce a new uncertainty-aware framework. In particular, Our method consists of two primary components: uncertainty estimation and uncertainty regularization. (1) In the uncertainty estimation phase, we incorporate an extra auxiliary detection branch alongside the primary detector. The prediction disparity between the primary and auxiliary detectors is leveraged to estimate uncertainty at the box coordinate level, including position, shape, orientation. (2) Based on the assessed uncertainty, we regularize the model training via adaptively adjusting every 3D bboxes coordinates. For pseudo bbox coordinates with high uncertainty, we assign a relatively low loss weight. Experiment verifies that the proposed method is robust against the noisy pseudo bboxes, yielding substantial improvements on nuScenes and Lyft compared to existing techniques, with increases of 6.9% in AP$_{BEV}$ and 2.5% in AP$_{3D}$ on nuScenes, and 2.2% in AP$_{BEV}$ and 1.0% in AP$_{3D}$ on Lyft.