Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHands Deep in Deep Learning for Hand Pose Estimation
Paper and Code
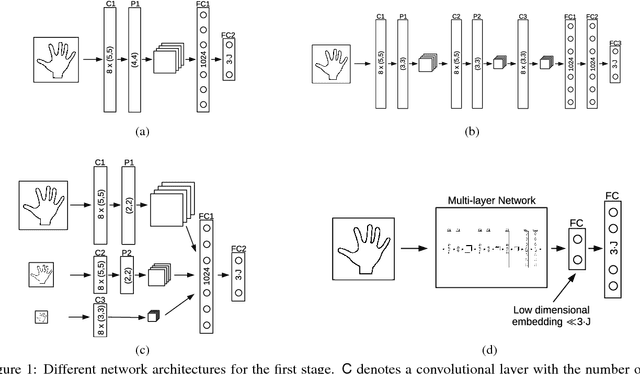

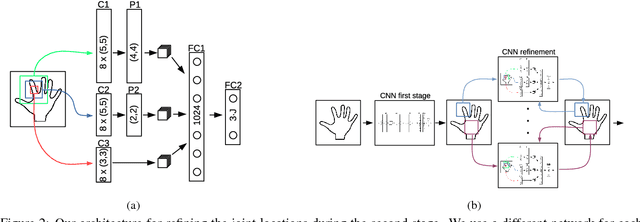
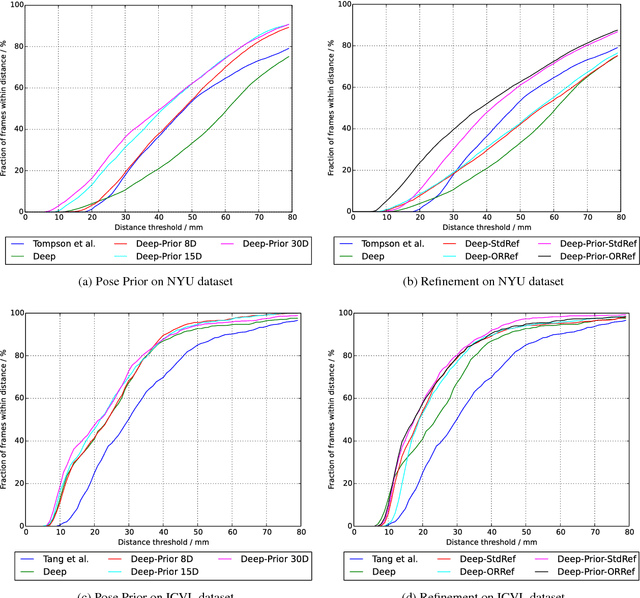
We introduce and evaluate several architectures for Convolutional Neural Networks to predict the 3D joint locations of a hand given a depth map. We first show that a prior on the 3D pose can be easily introduced and significantly improves the accuracy and reliability of the predictions. We also show how to use context efficiently to deal with ambiguities between fingers. These two contributions allow us to significantly outperform the state-of-the-art on several challenging benchmarks, both in terms of accuracy and computation times.
* In Proceedings of 20th Computer Vision Winter Workshop (CVWW)
2015, pp. 21-30 * added link to source https://github.com/moberweger/deep-prior
View paper on