Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeH-MaP: An Iterative and Hybrid Sequential Manipulation Planner
Paper and Code
Mar 15, 2024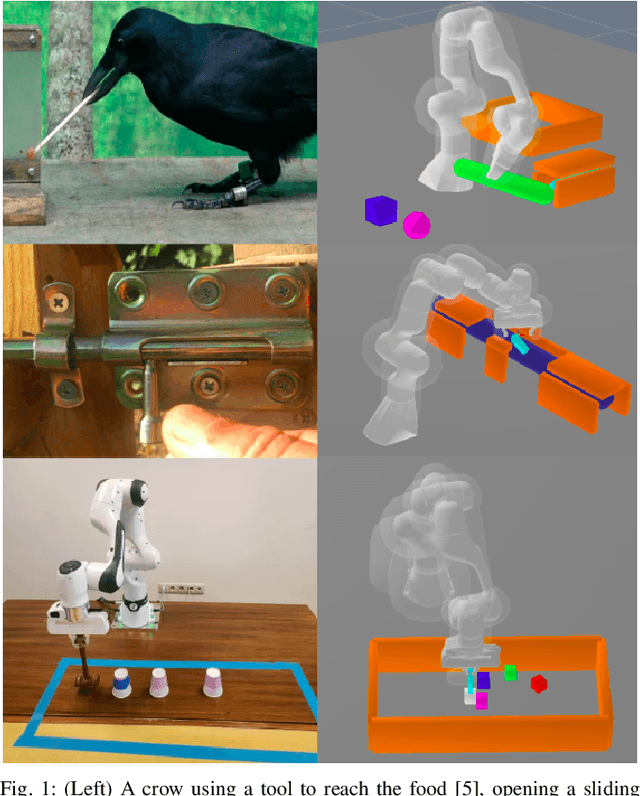



This study introduces the Hybrid Sequential Manipulation Planner (H-MaP), a novel approach that iteratively does motion planning using contact points and waypoints for complex sequential manipulation tasks in robotics. Combining optimization-based methods for generalizability and sampling-based methods for robustness, H-MaP enhances manipulation planning through active contact mode switches and enables interactions with auxiliary objects and tools. This framework, validated by a series of diverse physical manipulation tasks and real-robot experiments, offers a scalable and adaptable solution for complex real-world applications in robotic manipulation.
View paper on