Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGyroscopically Stabilized Robot: Balance and Tracking
Paper and Code
Dec 11, 2004
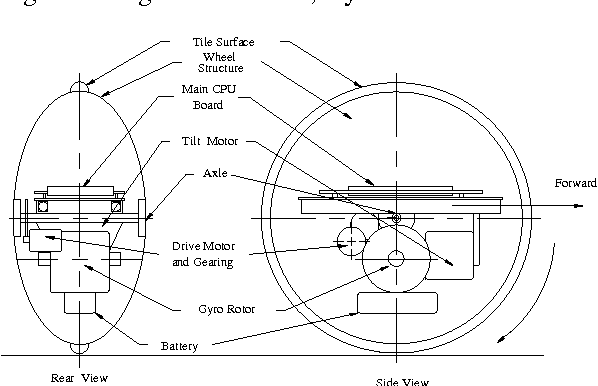
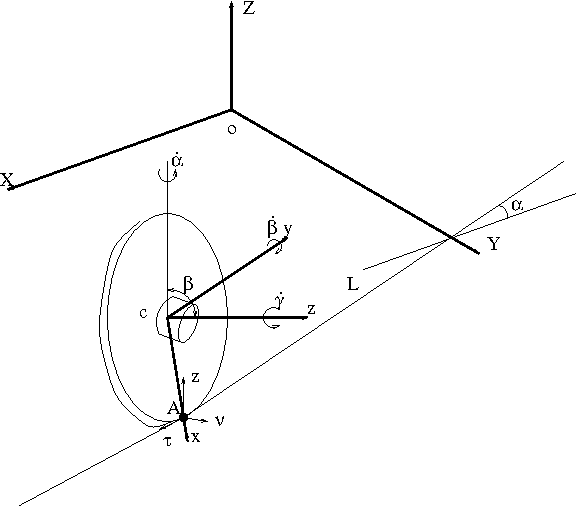
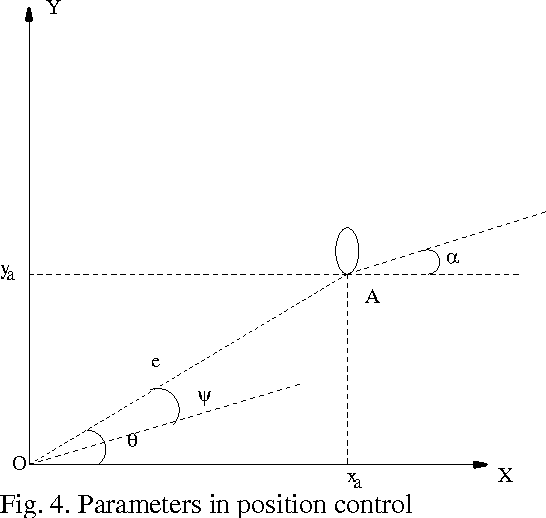
The single wheel, gyroscopically stabilized robot - Gyrover, is a dynamically stable but statically unstable, underactuated system. In this paper, based on the dynamic model of the robot, we investigate two classes of nonholonomic constraints associated with the system. Then, based on the backstepping technology, we propose a control law for balance control of Gyrover. Next, through transferring the systems states from Cartesian coordinate to polar coordinate, control laws for point-to-point control and line tracking in Cartesian space are provided.
* International Journal of Advanced Robotic Systems, Volume 1,
Number 1, March 2004, pp.23-32
View paper on