 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGuided Policy Search with Delayed Sensor Measurements
Paper and Code
Sep 29, 2017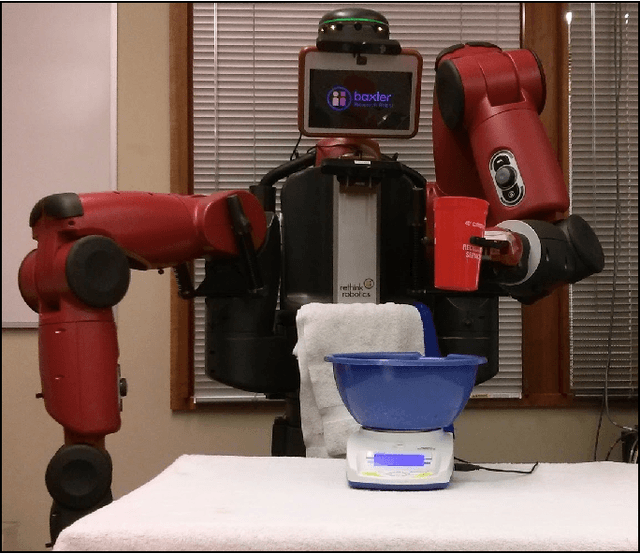

Guided policy search is a method for reinforcement learning that trains a general policy for accomplishing a given task by guiding the learning of the policy with multiple guiding distributions. Guided policy search relies on learning an underlying dynamical model of the environment and then, at each iteration of the algorithm, using that model to gradually improve the policy. This model, though, often makes the assumption that the environment dynamics are markovian, e.g., depend only on the current state and control signal. In this paper we apply guided policy search to a problem with non-markovian dynamics. Specifically, we apply it to the problem of pouring a precise amount of liquid from a cup into a bowl, where many of the sensor measurements experience non-trivial amounts of delay. We show that, with relatively simple state augmentation, guided policy search can be extended to non-markovian dynamical systems, where the non-markovianess is caused by delayed sensor readings.