 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGTP-SLAM: Game-Theoretic Priors for Simultaneous Localization and Mapping in Multi-Agent Scenarios
Paper and Code
Mar 30, 2022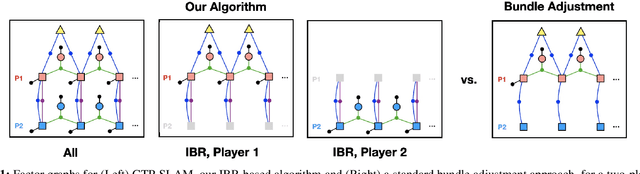
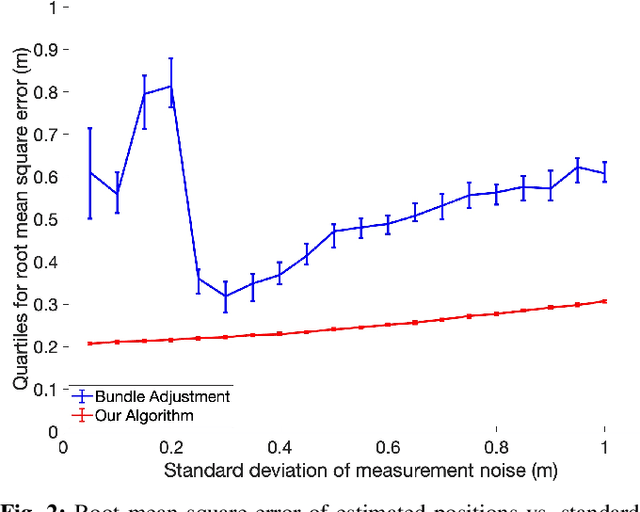
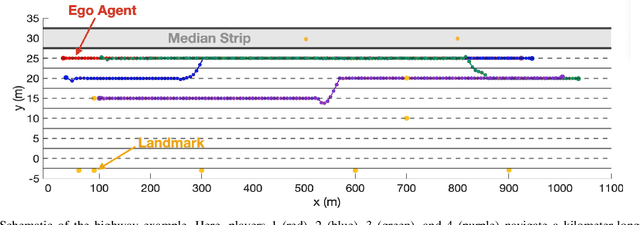
Robots operating in complex, multi-player settings must simultaneously model the environment and the behavior of human or robotic agents who share that environment. Environmental modeling is often approached using Simultaneous Localization and Mapping (SLAM) techniques; however, SLAM algorithms usually neglect multi-player interactions. In contrast, a recent branch of the motion planning literature uses dynamic game theory to explicitly model noncooperative interactions of multiple agents in a known environment with perfect localization. In this work, we fuse ideas from these disparate communities to solve SLAM problems with game theoretic priors. We present GTP-SLAM, a novel, iterative best response-based SLAM algorithm that accurately performs state localization and map reconstruction in an uncharted scene, while capturing the inherent game-theoretic interactions among multiple agents in that scene. By formulating the underlying SLAM problem as a potential game, we inherit a strong convergence guarantee. Empirical results indicate that, when deployed in a realistic traffic simulation, our approach performs localization and mapping more accurately than a standard bundle adjustment algorithm across a wide range of noise levels.