 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGrowSpace: Learning How to Shape Plants
Paper and Code
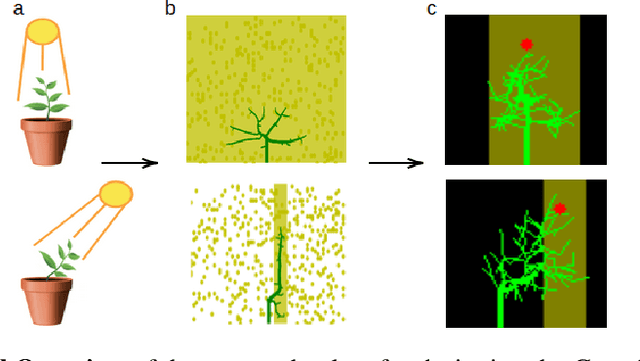
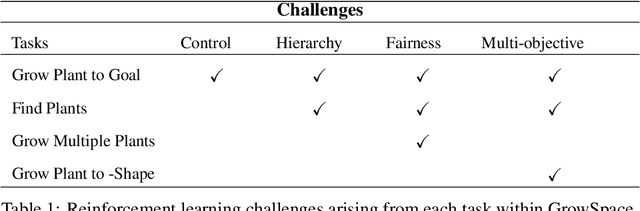
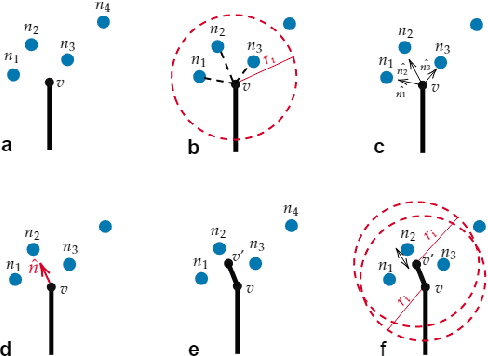
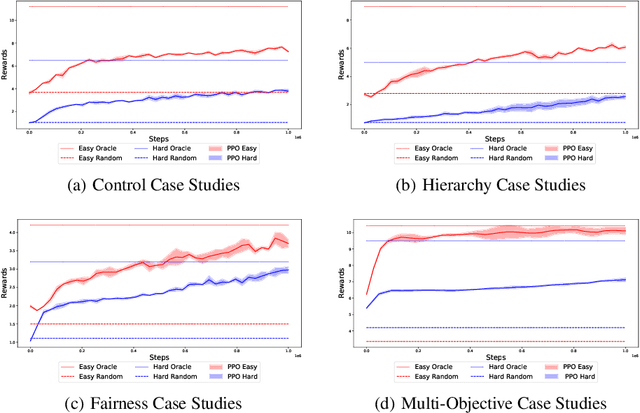
Plants are dynamic systems that are integral to our existence and survival. Plants face environment changes and adapt over time to their surrounding conditions. We argue that plant responses to an environmental stimulus are a good example of a real-world problem that can be approached within a reinforcement learning (RL)framework. With the objective of controlling a plant by moving the light source, we propose GrowSpace, as a new RL benchmark. The back-end of the simulator is implemented using the Space Colonisation Algorithm, a plant growing model based on competition for space. Compared to video game RL environments, this simulator addresses a real-world problem and serves as a test bed to visualize plant growth and movement in a faster way than physical experiments. GrowSpace is composed of a suite of challenges that tackle several problems such as control, multi-stage learning,fairness and multi-objective learning. We provide agent baselines alongside case studies to demonstrate the difficulty of the proposed benchmark.