 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGroup-based Motion Prediction for Navigation in Crowded Environments
Paper and Code
Aug 19, 2021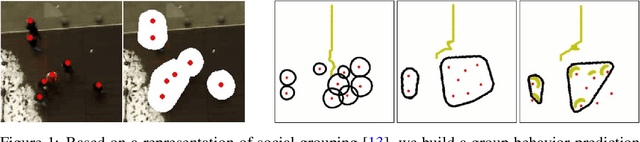
We focus on the problem of planning the motion of a robot in a dynamic multiagent environment such as a pedestrian scene. Enabling the robot to navigate safely and in a socially compliant fashion in such scenes requires a representation that accounts for the unfolding multiagent dynamics. Existing approaches to this problem tend to employ microscopic models of motion prediction that reason about the individual behavior of other agents. While such models may achieve high tracking accuracy in trajectory prediction benchmarks, they often lack an understanding of the group structures unfolding in crowded scenes. Inspired by the Gestalt theory from psychology, we build a Model Predictive Control framework (G-MPC) that leverages group-based prediction for robot motion planning. We conduct an extensive simulation study involving a series of challenging navigation tasks in scenes extracted from two real-world pedestrian datasets. We illustrate that G-MPC enables a robot to achieve statistically significantly higher safety and lower number of group intrusions than a series of baselines featuring individual pedestrian motion prediction models. Finally, we show that G-MPC can handle noisy lidar-scan estimates without significant performance losses.