Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGrounding object perception in a naive agent's sensorimotor experience
Paper and Code
Sep 26, 2016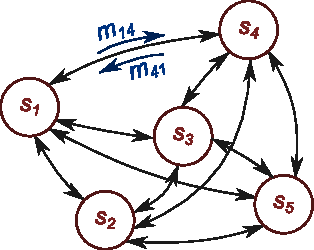
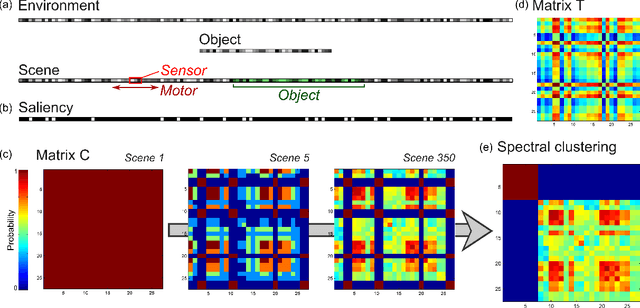
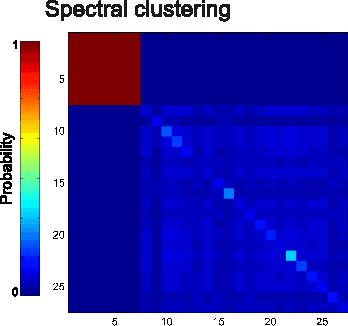
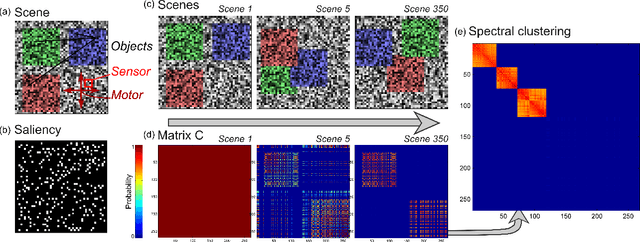
Artificial object perception usually relies on a priori defined models and feature extraction algorithms. We study how the concept of object can be grounded in the sensorimotor experience of a naive agent. Without any knowledge about itself or the world it is immersed in, the agent explores its sensorimotor space and identifies objects as consistent networks of sensorimotor transitions, independent from their context. A fundamental drive for prediction is assumed to explain the emergence of such networks from a developmental standpoint. An algorithm is proposed and tested to illustrate the approach.
* 7 pages, 4 figures, ICDL-Epirob 2015 conference
View paper on