 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Grip-that-there": An Investigation of Explicit and Implicit Task Allocation Techniques for Human-Robot Collaboration
Paper and Code
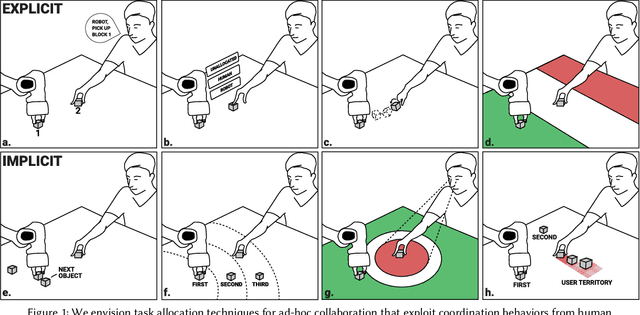

In ad-hoc human-robot collaboration (HRC), humans and robots work on a task without pre-planning the robot's actions prior to execution; instead, task allocation occurs in real-time. However, prior research has largely focused on task allocations that are pre-planned - there has not been a comprehensive exploration or evaluation of techniques where task allocation is adjusted in real-time. Inspired by HCI research on territoriality and proxemics, we propose a design space of novel task allocation techniques including both explicit techniques, where the user maintains agency, and implicit techniques, where the efficiency of automation can be leveraged. The techniques were implemented and evaluated using a tabletop HRC simulation in VR. A 16-participant study, which presented variations of a collaborative block stacking task, showed that implicit techniques enable efficient task completion and task parallelization, and should be augmented with explicit mechanisms to provide users with fine-grained control.