 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGraph-theoretical approach to robust 3D normal extraction of LiDAR data
Paper and Code
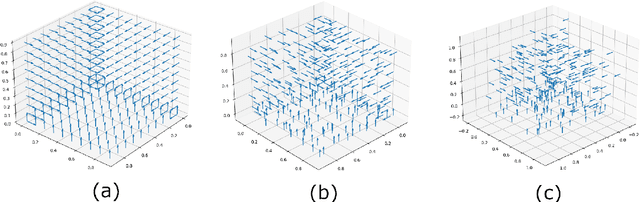
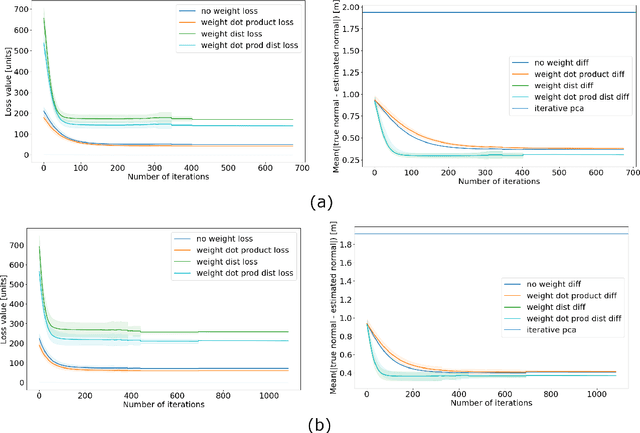
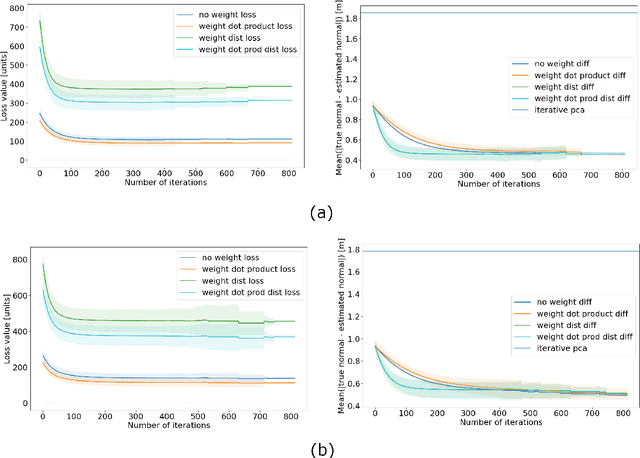
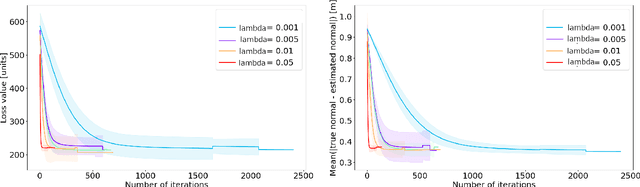
Low dimensional primitive feature extraction from LiDAR point clouds (such as planes) forms the basis of majority of LiDAR data processing tasks. A major challenge in LiDAR data analysis arises from the irregular nature of LiDAR data that forces practitioners to either regularize the data using some form of gridding or utilize a triangular mesh such as triangulated irregular network (TIN). While there have been a handful applications using LiDAR data as a connected graph, a principled treatment of utilizing graph-theoretical approach for LiDAR data modelling is still lacking. In this paper, we try to bridge this gap by utilizing graphical approach for normal estimation from LiDAR point clouds. We formulate the normal estimation problem in an optimization framework, where we find the corresponding normal vector for each LiDAR point by utilizing its nearest neighbors and simultaneously enforcing a graph smoothness assumption based on point samples. This is a non-linear constrained convex optimization problem which can then be solved using projected conjugate gradient descent to yield an unique solution. As an enhancement to our optimization problem, we also provide different weighted solutions based on the dot product of the normals and Euclidean distance between the points. In order to assess the performance of our proposed normal extraction method and weighting strategies, we first provide a detailed analysis on repeated randomly generated datasets with four different noise levels and four different tuning parameters. Finally, we benchmark our proposed method against existing state-of-the-art approaches on a large scale synthetic plane extraction dataset. The code for the proposed approach along with the simulations and benchmarking is available at https://github.com/arpan-kusari/graph-plane-extraction-simulation.