 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGraph Neural Networks for Motion Planning
Paper and Code
Jun 11, 2020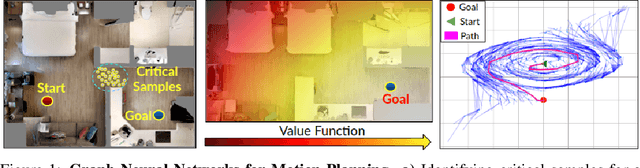
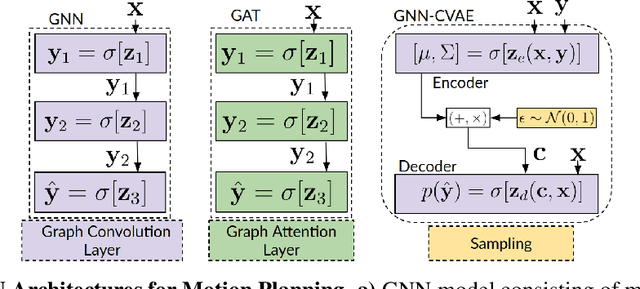
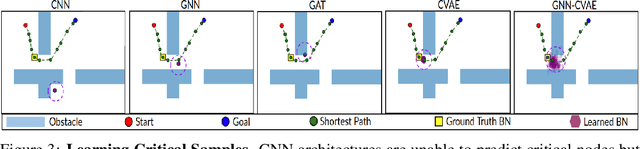
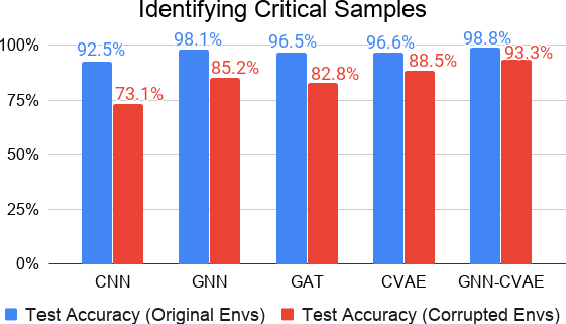
This paper investigates the feasibility of using Graph Neural Networks (GNNs) for classical motion planning problems. Planning algorithms that search through discrete spaces as well as continuous ones are studied. This paper proposes using GNNs to guide the search algorithm by exploiting the ability of GNNs to extract low level information about the topology of a planning space. We present two techniques, GNNs over dense fixed graphs for low-dimensional problems and sampling-based GNNs for high-dimensional problems. We examine the ability of a GNN to tackle planning problems that are heavily dependent on the topology of the space such as identifying critical nodes, learning a heuristic that guides exploration in $\text{A}^*$, and learning the sampling distribution in Rapidly-exploring Random Trees (RRT). We demonstrate that GNNs can offer better results when compared to traditional analytic methods as well as learning-based approaches that employ fully-connected networks or convolutional neural networks.