Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGraph Neural Networks for Modelling Traffic Participant Interaction
Paper and Code
Mar 04, 2019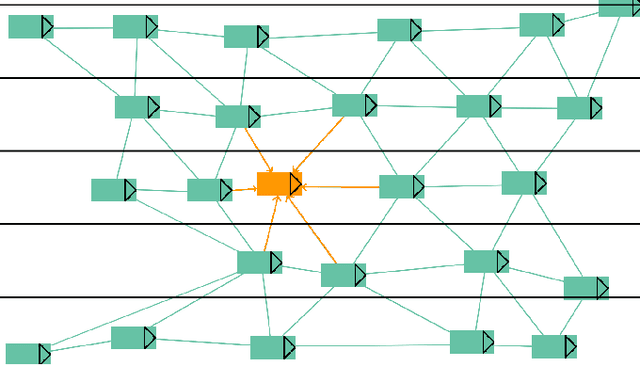
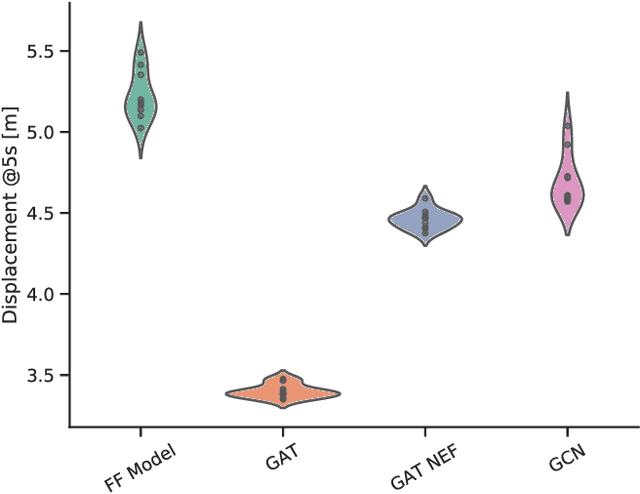
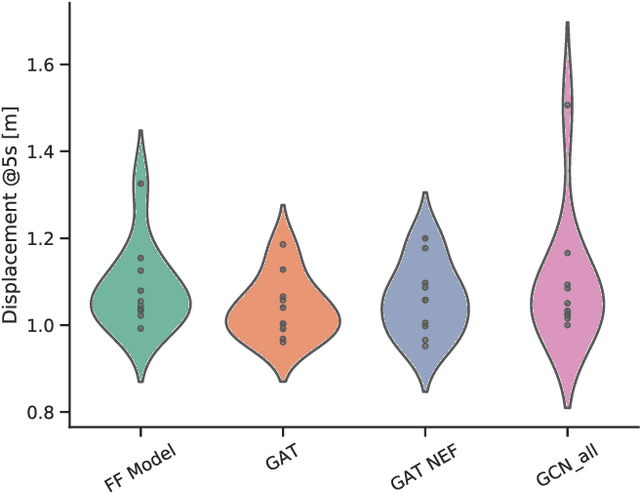
By interpreting a traffic scene as a graph of interacting vehicles, we gain a flexible abstract representation which allows us to apply Graph Neural Network (GNN) models for traffic prediction. These naturally take interaction between traffic participants into account while being computationally efficient and providing large model capacity. We evaluate two state-of-the art GNN architectures and introduce several adaptations for our specific scenario. We show that prediction error in scenarios with much interaction decreases by 30% compared to a model that does not take interactions into account. This suggests a graph interpretation of interacting traffic participants is a worthwhile addition to traffic prediction systems.
View paper on