 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGradient-free Multi-domain Optimization for Autonomous Systems
Paper and Code
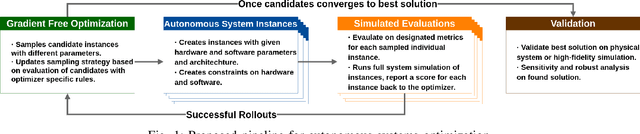
Autonomous systems are composed of several subsystems such as mechanical, propulsion, perception, planning and control. These are traditionally designed separately which makes performance optimization of the integrated system a significant challenge. In this paper, we study the problem of using gradient-free optimization methods to jointly optimize the multiple domains of an autonomous system to find the set of optimal architectures for both hardware and software. We specifically perform multi-domain, multi-parameter optimization on an autonomous vehicle to find the best decision-making process, motion planning and control algorithms, and the physical parameters for autonomous racing. We detail the multi-domain optimization scheme, benchmark with different core components, and provide insights for generalization to new autonomous systems. In addition, this paper provides a benchmark of the performances of six different gradient-free optimizers in three different operating environments. Our approach is validated with a case study where we describe the autonomous vehicle system architecture, optimization methods, and finally, provide an argument on gradient-free optimization being a powerful choice to improve the performance of autonomous systems in an integrated manner.