 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGradient-based Uncertainty for Monocular Depth Estimation
Paper and Code
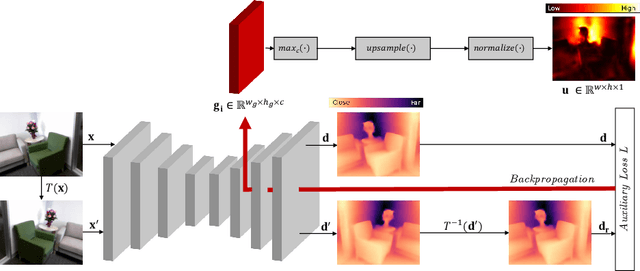
In monocular depth estimation, disturbances in the image context, like moving objects or reflecting materials, can easily lead to erroneous predictions. For that reason, uncertainty estimates for each pixel are necessary, in particular for safety-critical applications such as automated driving. We propose a post hoc uncertainty estimation approach for an already trained and thus fixed depth estimation model, represented by a deep neural network. The uncertainty is estimated with the gradients which are extracted with an auxiliary loss function. To avoid relying on ground-truth information for the loss definition, we present an auxiliary loss function based on the correspondence of the depth prediction for an image and its horizontally flipped counterpart. Our approach achieves state-of-the-art uncertainty estimation results on the KITTI and NYU Depth V2 benchmarks without the need to retrain the neural network. Models and code are publicly available at https://github.com/jhornauer/GrUMoDepth.