 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGPUDrive: Data-driven, multi-agent driving simulation at 1 million FPS
Paper and Code


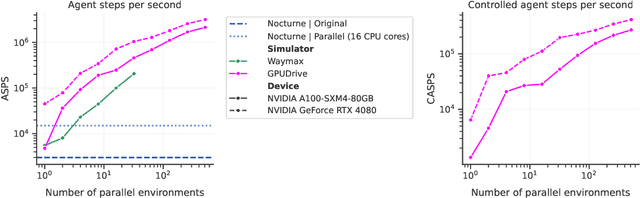

Multi-agent learning algorithms have been successful at generating superhuman planning in a wide variety of games but have had little impact on the design of deployed multi-agent planners. A key bottleneck in applying these techniques to multi-agent planning is that they require billions of steps of experience. To enable the study of multi-agent planning at this scale, we present GPUDrive, a GPU-accelerated, multi-agent simulator built on top of the Madrona Game Engine that can generate over a million steps of experience per second. Observation, reward, and dynamics functions are written directly in C++, allowing users to define complex, heterogeneous agent behaviors that are lowered to high-performance CUDA. We show that using GPUDrive we are able to effectively train reinforcement learning agents over many scenes in the Waymo Motion dataset, yielding highly effective goal-reaching agents in minutes for individual scenes and generally capable agents in a few hours. We ship these trained agents as part of the code base at https://github.com/Emerge-Lab/gpudrive.