Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGolfer: Trajectory Prediction with Masked Goal Conditioning MnM Network
Paper and Code
Jul 02, 2022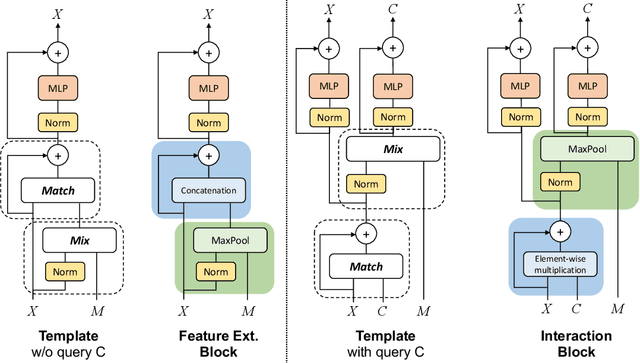
Transformers have enabled breakthroughs in NLP and computer vision, and have recently began to show promising performance in trajectory prediction for Autonomous Vehicle (AV). How to efficiently model the interactive relationships between the ego agent and other road and dynamic objects remains challenging for the standard attention module. In this work we propose a general Transformer-like architectural module MnM network equipped with novel masked goal conditioning training procedures for AV trajectory prediction. The resulted model, named golfer, achieves state-of-the-art performance, winning the 2nd place in the 2022 Waymo Open Dataset Motion Prediction Challenge and ranked 1st place according to minADE.
* A preliminary version is presented at CVPR 2022 Workshop on
Autonomous Driving https://cvpr2022.wad.vision
View paper on