 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGoal-oriented Object Importance Estimation in On-road Driving Videos
Paper and Code
May 08, 2019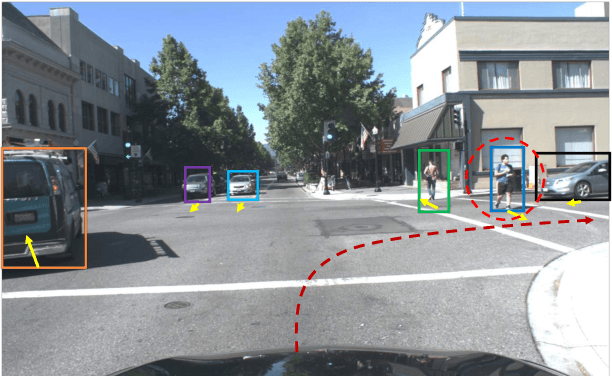
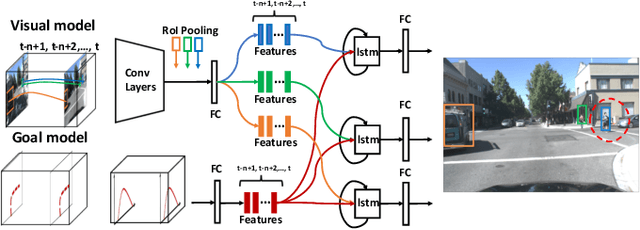
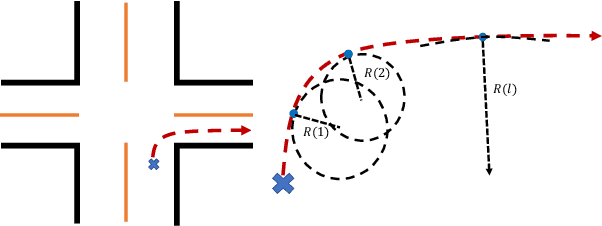
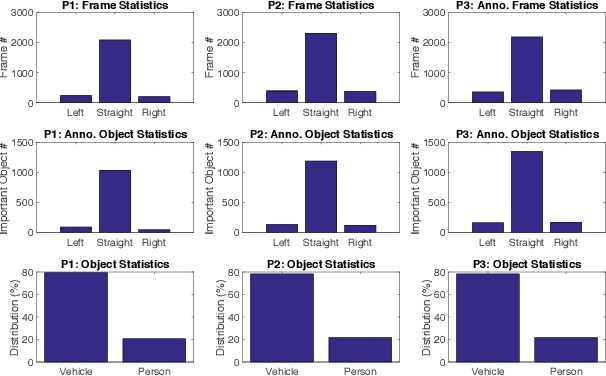
We formulate a new problem as Object Importance Estimation (OIE) in on-road driving videos, where the road users are considered as important objects if they have influence on the control decision of the ego-vehicle's driver. The importance of a road user depends on both its visual dynamics, e.g., appearance, motion and location, in the driving scene and the driving goal, \emph{e.g}., the planned path, of the ego vehicle. We propose a novel framework that incorporates both visual model and goal representation to conduct OIE. To evaluate our framework, we collect an on-road driving dataset at traffic intersections in the real world and conduct human-labeled annotation of the important objects. Experimental results show that our goal-oriented method outperforms baselines and has much more improvement on the left-turn and right-turn scenarios. Furthermore, we explore the possibility of using object importance for driving control prediction and demonstrate that binary brake prediction can be improved with the information of object importance.