 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGoal Exploration via Adaptive Skill Distribution for Goal-Conditioned Reinforcement Learning
Paper and Code
Apr 19, 2024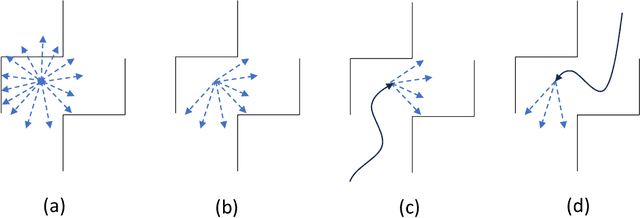
Exploration efficiency poses a significant challenge in goal-conditioned reinforcement learning (GCRL) tasks, particularly those with long horizons and sparse rewards. A primary limitation to exploration efficiency is the agent's inability to leverage environmental structural patterns. In this study, we introduce a novel framework, GEASD, designed to capture these patterns through an adaptive skill distribution during the learning process. This distribution optimizes the local entropy of achieved goals within a contextual horizon, enhancing goal-spreading behaviors and facilitating deep exploration in states containing familiar structural patterns. Our experiments reveal marked improvements in exploration efficiency using the adaptive skill distribution compared to a uniform skill distribution. Additionally, the learned skill distribution demonstrates robust generalization capabilities, achieving substantial exploration progress in unseen tasks containing similar local structures.