 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGlobal Convergence of Two-timescale Actor-Critic for Solving Linear Quadratic Regulator
Paper and Code
Aug 18, 2022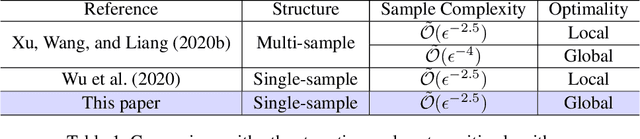
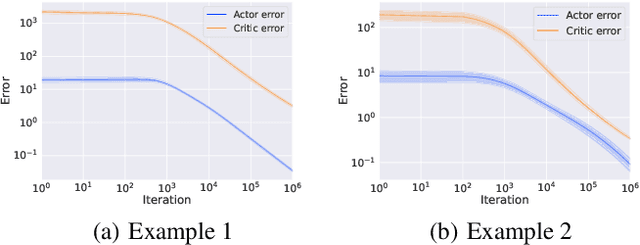
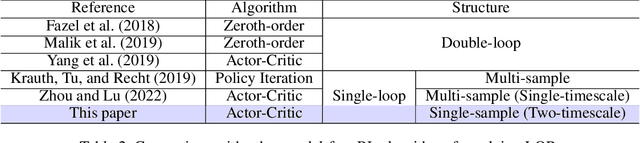
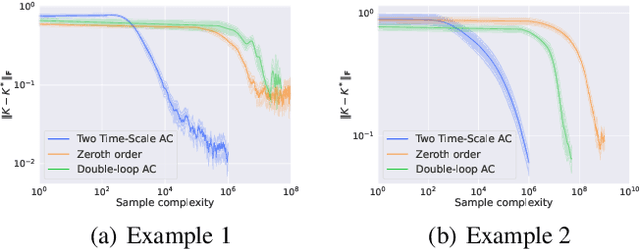
The actor-critic (AC) reinforcement learning algorithms have been the powerhouse behind many challenging applications. Nevertheless, its convergence is fragile in general. To study its instability, existing works mostly consider the uncommon double-loop variant or basic models with finite state and action space. We investigate the more practical single-sample two-timescale AC for solving the canonical linear quadratic regulator (LQR) problem, where the actor and the critic update only once with a single sample in each iteration on an unbounded continuous state and action space. Existing analysis cannot conclude the convergence for such a challenging case. We develop a new analysis framework that allows establishing the global convergence to an $\epsilon$-optimal solution with at most an $\tilde{\mathcal{O}}(\epsilon^{-2.5})$ sample complexity. To our knowledge, this is the first finite-time convergence analysis for the single sample two-timescale AC for solving LQR with global optimality. The sample complexity improves those of other variants by orders, which sheds light on the practical wisdom of single sample algorithms. We also further validate our theoretical findings via comprehensive simulation comparisons.