 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGivenness Hierarchy Theoretic Cognitive Status Filtering
Paper and Code
May 22, 2020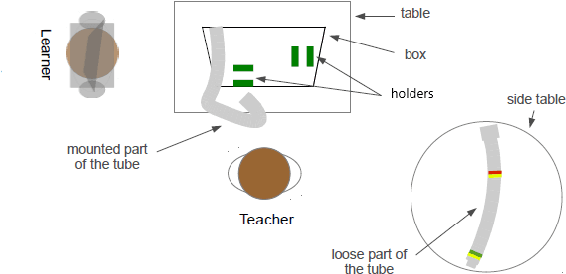
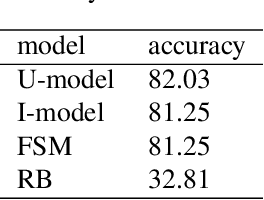
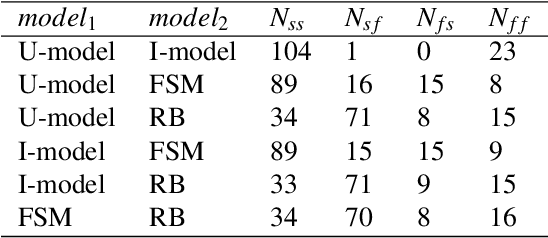
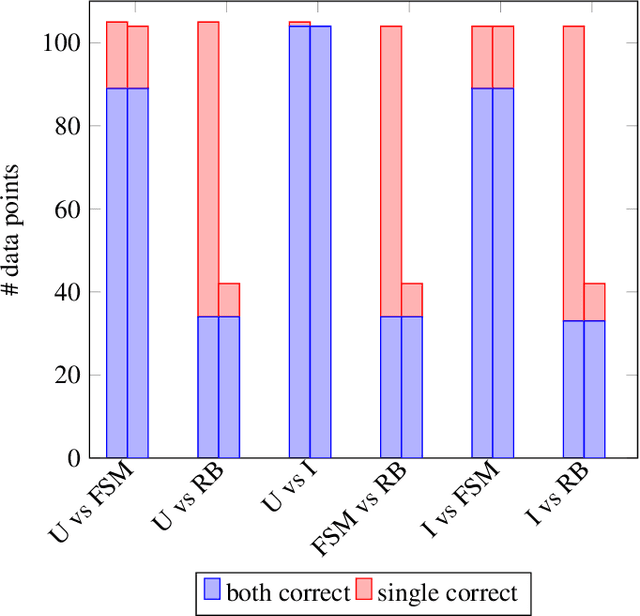
For language-capable interactive robots to be effectively introduced into human society, they must be able to naturally and efficiently communicate about the objects, locations, and people found in human environments. An important aspect of natural language communication is the use of pronouns. Ac-cording to the linguistic theory of the Givenness Hierarchy(GH), humans use pronouns due to implicit assumptions about the cognitive statuses their referents have in the minds of their conversational partners. In previous work, Williams et al. presented the first computational implementation of the full GH for the purpose of robot language understanding, leveraging a set of rules informed by the GH literature. However, that approach was designed specifically for language understanding,oriented around GH-inspired memory structures used to assess what entities are candidate referents given a particular cognitive status. In contrast, language generation requires a model in which cognitive status can be assessed for a given entity. We present and compare two such models of cognitive status: a rule-based Finite State Machine model directly informed by the GH literature and a Cognitive Status Filter designed to more flexibly handle uncertainty. The models are demonstrated and evaluated using a silver-standard English subset of the OFAI Multimodal Task Description Corpus.