 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGINK: Graph-based Interaction-aware Kinodynamic Planning via Reinforcement Learning for Autonomous Driving
Paper and Code
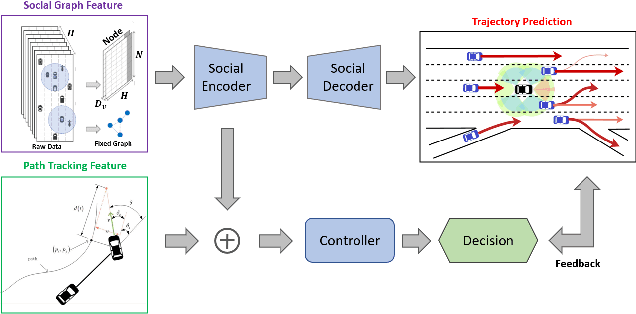
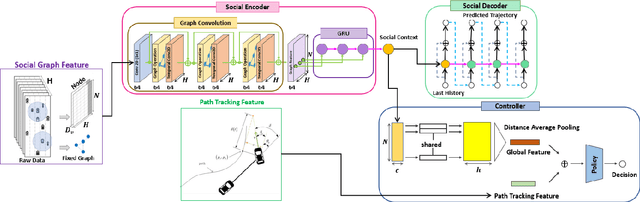


There are many challenges in applying deep reinforcement learning (DRL) to autonomous driving in a structured environment such as an urban area. This is because the massive traffic flows moving along the road network change dynamically. It is a key factor to detect changes in the intentions of surrounding vehicles and quickly find a response strategy. In this paper, we suggest a new framework that effectively combines graph-based intention representation learning and reinforcement learning for kinodynamic planning. Specifically, the movement of dynamic agents is expressed as a graph. The spatio-temporal locality of node features is conserved and the features are aggregated by considering the interaction between adjacent nodes. We simultaneously learn motion planner and controller that share the aggregated information via a safe RL framework. We intuitively interpret a given situation with predicted trajectories to generate additional cost signals. The dense cost signals encourage the policy to be safe for dynamic risk. Moreover, by utilizing the data obtained through the direct rollout of learned policy, robust intention inference is achieved for various situations encountered in training. We set up a navigation scenario in which various situations exist by using CARLA, an urban driving simulator. The experiments show the state-of-the-art performance of our approach compared to the existing baselines.