 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGeometric-based Line Segment Tracking for HDR Stereo Sequences
Paper and Code
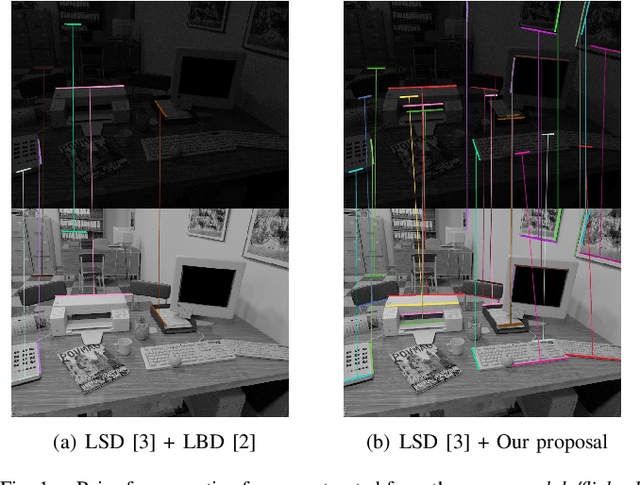

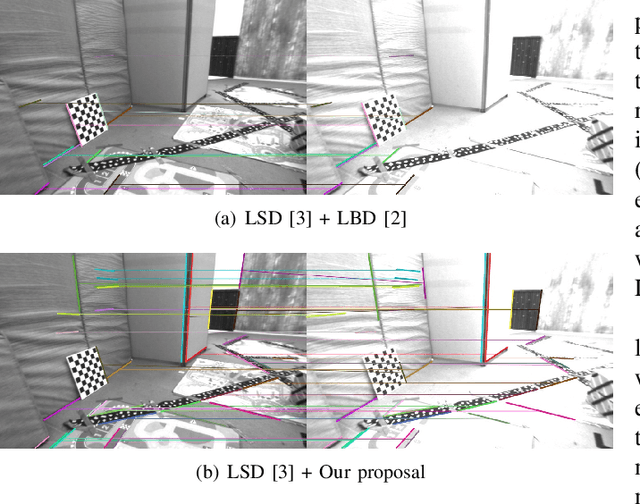

In this work, we propose a purely geometrical approach for the robust matching of line segments for challenging stereo streams with severe illumination changes or High Dynamic Range (HDR) environments. To that purpose, we exploit the univocal nature of the matching problem, i.e. every observation must be corresponded with a single feature or not corresponded at all. We state the problem as a sparse, convex, L1-minimization of the matching vector regularized by the geometric constraints. This formulation allows for the robust tracking of line segments along sequences where traditional appearance-based matching techniques tend to fail due to dynamic changes in illumination conditions. Moreover, the proposed matching algorithm also results in a considerable speed-up of previous state of the art techniques making it suitable for real-time applications such as Visual Odometry (VO). This, of course, comes at expense of a slightly lower number of matches in comparison with appearance based methods, and also limits its application to continuous video sequences, as it is rather constrained to small pose increments between consecutive frames. We validate the claimed advantages by first evaluating the matching performance in challenging video sequences, and then testing the method in a benchmarked point and line based VO algorithm.