 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGenerative Adversarial Imitation Learning for End-to-End Autonomous Driving on Urban Environments
Paper and Code
Oct 16, 2021
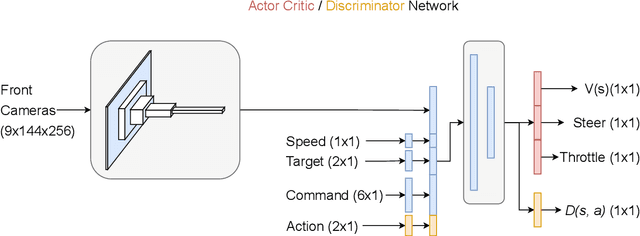

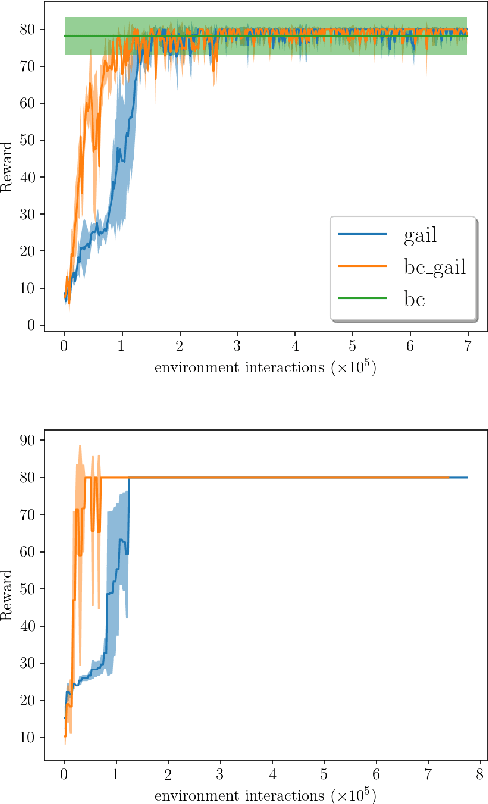
Autonomous driving is a complex task, which has been tackled since the first self-driving car ALVINN in 1989, with a supervised learning approach, or behavioral cloning (BC). In BC, a neural network is trained with state-action pairs that constitute the training set made by an expert, i.e., a human driver. However, this type of imitation learning does not take into account the temporal dependencies that might exist between actions taken in different moments of a navigation trajectory. These type of tasks are better handled by reinforcement learning (RL) algorithms, which need to define a reward function. On the other hand, more recent approaches to imitation learning, such as Generative Adversarial Imitation Learning (GAIL), can train policies without explicitly requiring to define a reward function, allowing an agent to learn by trial and error directly on a training set of expert trajectories. In this work, we propose two variations of GAIL for autonomous navigation of a vehicle in the realistic CARLA simulation environment for urban scenarios. Both of them use the same network architecture, which process high dimensional image input from three frontal cameras, and other nine continuous inputs representing the velocity, the next point from the sparse trajectory and a high-level driving command. We show that both of them are capable of imitating the expert trajectory from start to end after training ends, but the GAIL loss function that is augmented with BC outperforms the former in terms of convergence time and training stability.