 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGenerating Task-specific Robotic Grasps
Paper and Code
Mar 20, 2022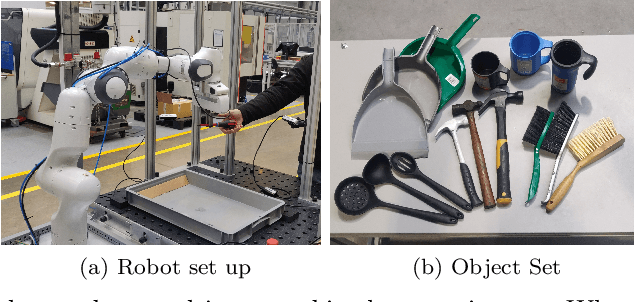

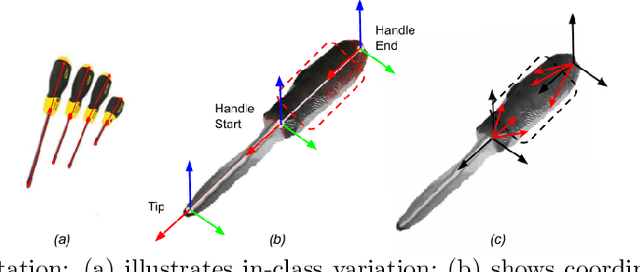
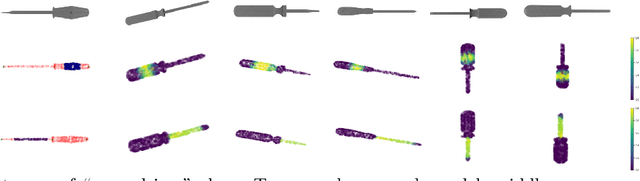
This paper describes a method for generating robot grasps by jointly considering stability and other task and object-specific constraints. We introduce a three-level representation that is acquired for each object class from a small number of exemplars of objects, tasks, and relevant grasps. The representation encodes task-specific knowledge for each object class as a relationship between a keypoint skeleton and suitable grasp points that is preserved despite intra-class variations in scale and orientation. The learned models are queried at run time by a simple sampling-based method to guide the generation of grasps that balance task and stability constraints. We ground and evaluate our method in the context of a Franka Emika Panda robot assisting a human in picking tabletop objects for which the robot does not have prior CAD models. Experimental results demonstrate that in comparison with a baseline method that only focuses on stability, our method is able to provide suitable grasps for different tasks.