 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGeneralized Proximal Policy Optimization with Sample Reuse
Paper and Code
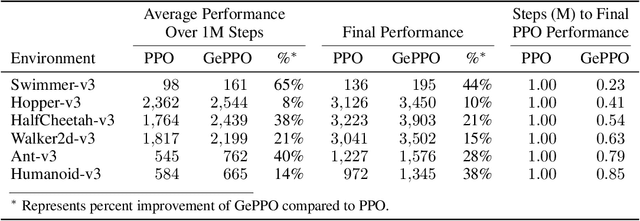
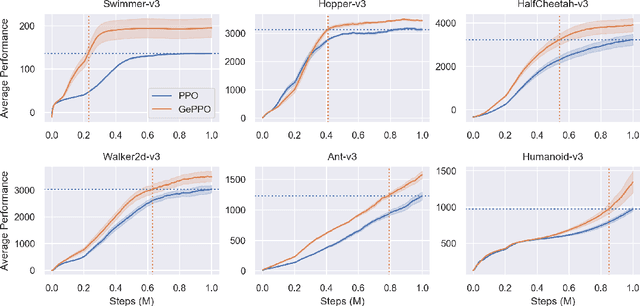

In real-world decision making tasks, it is critical for data-driven reinforcement learning methods to be both stable and sample efficient. On-policy methods typically generate reliable policy improvement throughout training, while off-policy methods make more efficient use of data through sample reuse. In this work, we combine the theoretically supported stability benefits of on-policy algorithms with the sample efficiency of off-policy algorithms. We develop policy improvement guarantees that are suitable for the off-policy setting, and connect these bounds to the clipping mechanism used in Proximal Policy Optimization. This motivates an off-policy version of the popular algorithm that we call Generalized Proximal Policy Optimization with Sample Reuse. We demonstrate both theoretically and empirically that our algorithm delivers improved performance by effectively balancing the competing goals of stability and sample efficiency.