 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGeneralized Proximal Methods for Pose Graph Optimization
Paper and Code
Dec 04, 2020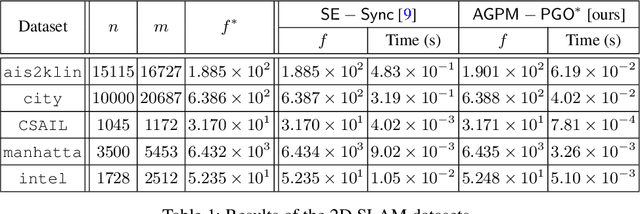
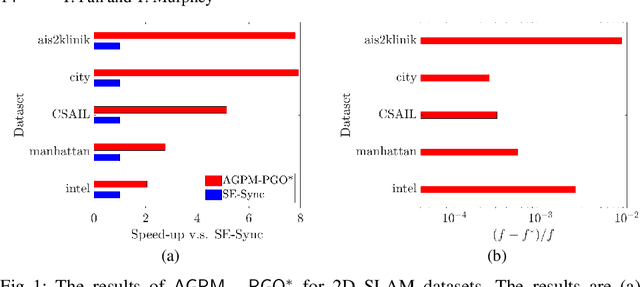
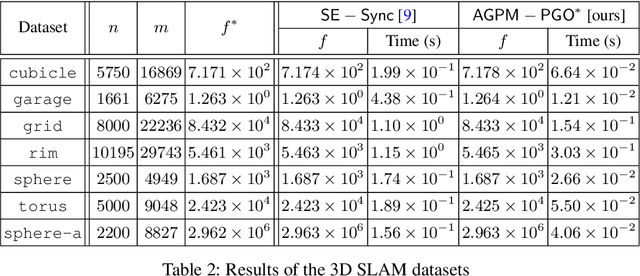
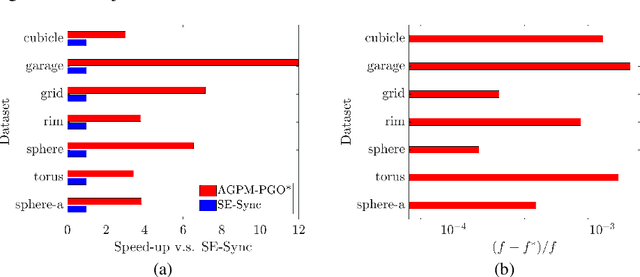
In this paper, we generalize proximal methods that were originally designed for convex optimization on normed vector space to non-convex pose graph optimization (PGO) on special Euclidean groups, and show that our proposed generalized proximal methods for PGO converge to first-order critical points. Furthermore, we propose methods that significantly accelerate the rates of convergence almost without loss of any theoretical guarantees. In addition, our proposed methods can be easily distributed and parallelized with no compromise of efficiency. The efficacy of this work is validated through implementation on simultaneous localization and mapping (SLAM) and distributed 3D sensor network localization, which indicate that our proposed methods are a lot faster than existing techniques to converge to sufficient accuracy for practical use.